 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupervised learning and tree search for real-time storage allocation in Robotic Mobile Fulfillment Systems
May 31, 2021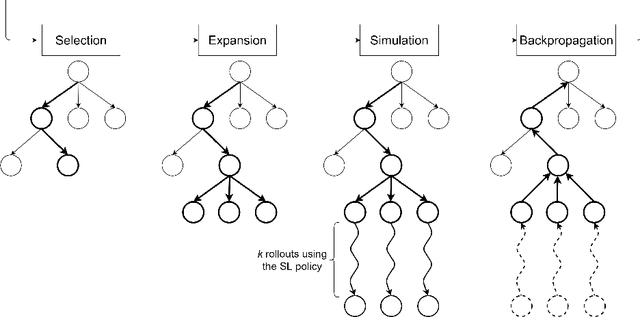
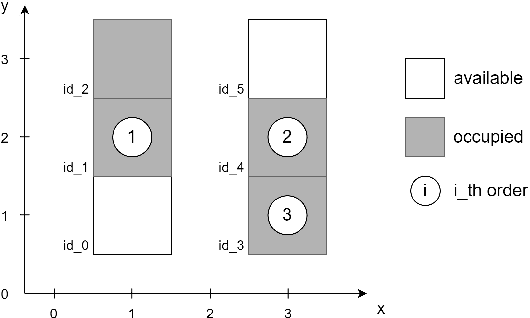
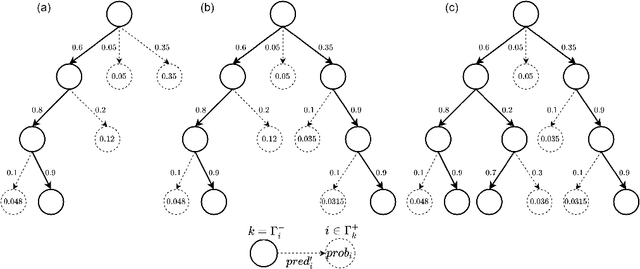
A Robotic Mobile Fulfillment System is a robotised parts-to-picker system that is particularly well-suited for e-commerce warehousing. One distinguishing feature of this type of warehouse is its high storage modularity. Numerous robots are moving shelves simultaneously, and the shelves can be returned to any open location after the picking operation is completed. This work focuses on the real-time storage allocation problem to minimise the travel time of the robots. An efficient -- but computationally costly -- Monte Carlo Tree Search method is used offline to generate high-quality experience. This experience can be learned by a neural network with a proper coordinates-based features representation. The obtained neural network is used as an action predictor in several new storage policies, either as-is or in rollout and supervised tree search strategies. Resulting performance levels depend on the computing time available at a decision step and are consistently better compared to real-time decision rules from the literature.
E-commerce warehousing: learning a storage policy
Jan 21, 2021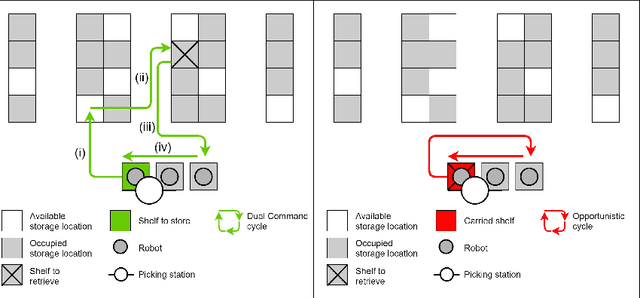
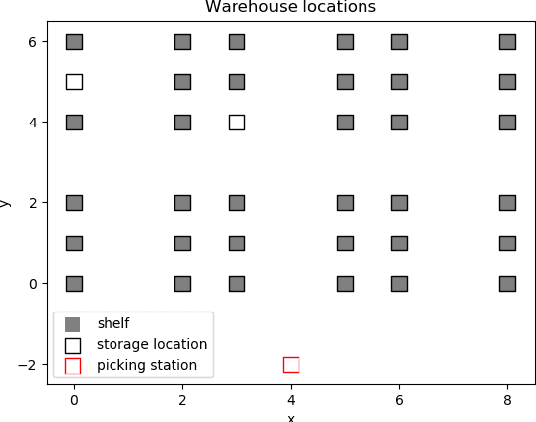
E-commerce with major online retailers is changing the way people consume. The goal of increasing delivery speed while remaining cost-effective poses significant new challenges for supply chains as they race to satisfy the growing and fast-changing demand. In this paper, we consider a warehouse with a Robotic Mobile Fulfillment System (RMFS), in which a fleet of robots stores and retrieves shelves of items and brings them to human pickers. To adapt to changing demand, uncertainty, and differentiated service (e.g., prime vs. regular), one can dynamically modify the storage allocation of a shelf. The objective is to define a dynamic storage policy to minimise the average cycle time used by the robots to fulfil requests. We propose formulating this system as a Partially Observable Markov Decision Process, and using a Deep Q-learning agent from Reinforcement Learning, to learn an efficient real-time storage policy that leverages repeated experiences and insightful forecasts using simulations. Additionally, we develop a rollout strategy to enhance our method by leveraging more information available at a given time step. Using simulations to compare our method to traditional storage rules used in the industry showed preliminary results up to 14\% better in terms of travelling times.