 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative 2D Reconfiguration using Spatio-Temporal Planning and Load Transferring
Nov 16, 2022



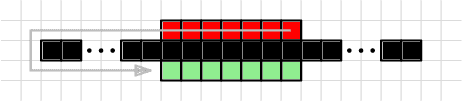
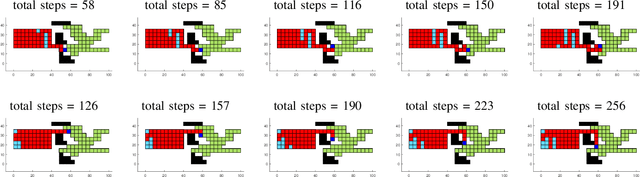
We present progress on the problem of reconfiguring a 2D arrangement of building material by a cooperative set of robots. These robots are subjected to the constraints of avoiding obstacles and maintaining connectivity of the structure. We develop two reconfiguration methods, one based on spatio-temporal planning, and one based on target swapping. Both methods achieve coordinated motion of robots by avoiding deadlocks and maintaining all constraints. Both methods also increase efficiency by reducing the amount of waiting times and lowering combined travel costs. The resulting progress is validated by simulations that also scale the number of robots.
Connected Reconfiguration of Polyominoes Amid Obstacles using RRT*
Jul 04, 2022

This paper investigates using a sampling-based approach, the RRT*, to reconfiguring a 2D set of connected tiles in complex environments, where multiple obstacles might be present. Since the target application is automated building of discrete, cellular structures using mobile robots, there are constraints that determine what tiles can be picked up and where they can be dropped off during reconfiguration. We compare our approach to two algorithms as global and local planners, and show that we are able to find more efficient build sequences using a reasonable amount of samples, in environments with varying degrees of obstacle space.