 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe CAPSARII Approach to Cyber-Secure Wearable, Ultra-Low-Power Networked Sensors for Soldier Health Monitoring
Feb 08, 2026The European Defence Agency's revised Capability Development Plan (CDP) identifies as a priority improving ground combat capabilities by enhancing soldiers' equipment for better protection. The CAPSARII project proposes in innovative wearable system and Internet of Battlefield Things (IoBT) framework to monitor soldiers' physiological and psychological status, aiding tactical decisions and medical support. The CAPSARII system will enhance situational awareness and operational effectiveness by monitoring physiological, movement and environmental parameters, providing real-time tactical decision support through AI models deployed on edge nodes and enable data analysis and comparative studies via cloud-based analytics. CAPSARII also aims at improving usability through smart textile integration, longer battery life, reducing energy consumption through software and hardware optimizations, and address security concerns with efficient encryption and strong authentication methods. This innovative approach aims to transform military operations by providing a robust, data-driven decision support tool.
Closely-Spaced Object Classification Using MuyGPyS
Nov 17, 2023



Accurately detecting rendezvous and proximity operations (RPO) is crucial for understanding how objects are behaving in the space domain. However, detecting closely-spaced objects (CSO) is challenging for ground-based optical space domain awareness (SDA) algorithms as two objects close together along the line-of-sight can appear blended as a single object within the point-spread function (PSF) of the optical system. Traditional machine learning methods can be useful for differentiating between singular objects and closely-spaced objects, but many methods require large training sample sizes or high signal-to-noise conditions. The quality and quantity of realistic data make probabilistic classification methods a superior approach, as they are better suited to handle these data inadequacies. We present CSO classification results using the Gaussian process python package, MuyGPyS, and examine classification accuracy as a function of angular separation and magnitude difference between the simulated satellites. This orbit-independent analysis is done on highly accurate simulated SDA images that emulate realistic ground-based commercial-of-the-shelf (COTS) optical sensor observations of CSOs. We find that MuyGPyS outperforms traditional machine learning methods, especially under more challenging circumstances.
Three-dimensional coherent diffraction snapshot imaging using extreme ultraviolet radiation from a free electron laser
Apr 03, 2023



The possibility to obtain a three-dimensional representation of a single object with sub-$\mu$m resolution is crucial in many fields, from material science to clinical diagnostics. This is typically achieved through tomography, which combines multiple two-dimensional images of the same object captured at different orientations. However, this serial imaging method prevents single-shot acquisition in imaging experiments at free electron lasers. In the present experiment, we report on a new approach to 3D imaging using extreme-ultraviolet radiation. In this method, two EUV pulses hit simultaneously an isolated 3D object from different sides, generating independent coherent diffraction patterns, resulting in two distinct bidimensional views obtained via phase retrieval. These views are then used to obtain a 3D reconstruction using a ray tracing algorithm. This EUV stereoscopic imaging approach, similar to the natural process of binocular vision, provides sub-$\mu$m spatial resolution and single shot capability. Moreover, ultrafast time resolution and spectroscopy can be readily implemented, a further extension to X-ray wavelengths can be envisioned as well.
MuyGPs: Scalable Gaussian Process Hyperparameter Estimation Using Local Cross-Validation
Apr 29, 2021
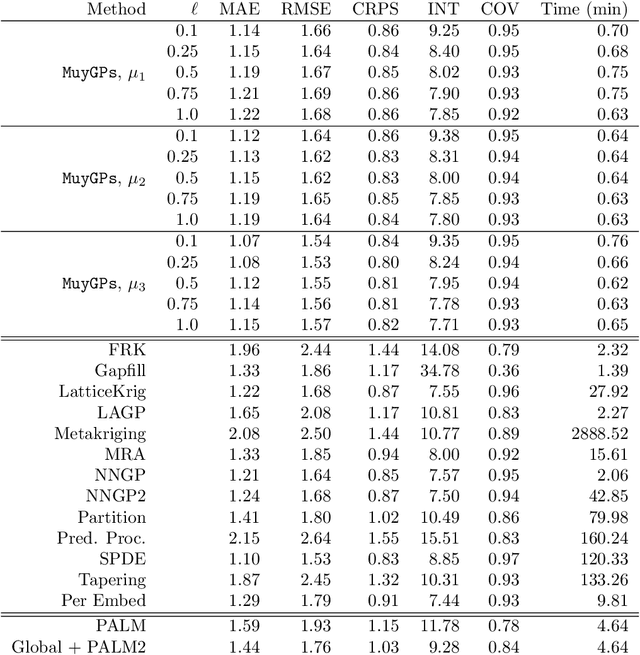
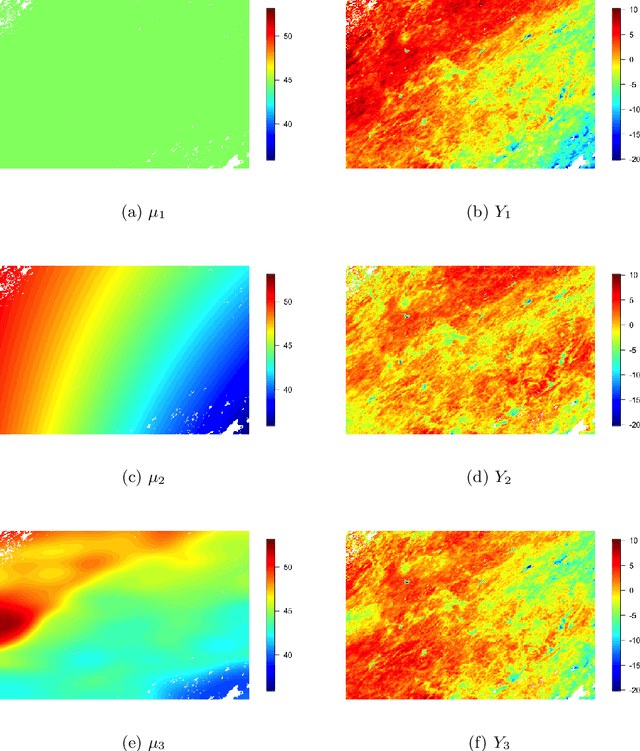
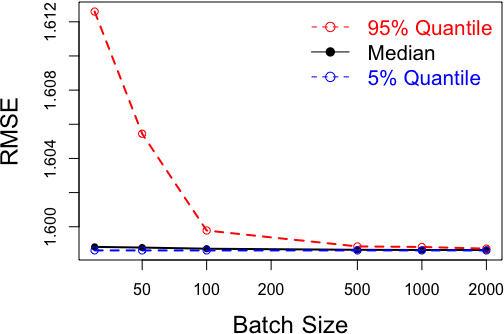
Gaussian processes (GPs) are non-linear probabilistic models popular in many applications. However, na\"ive GP realizations require quadratic memory to store the covariance matrix and cubic computation to perform inference or evaluate the likelihood function. These bottlenecks have driven much investment in the development of approximate GP alternatives that scale to the large data sizes common in modern data-driven applications. We present in this manuscript MuyGPs, a novel efficient GP hyperparameter estimation method. MuyGPs builds upon prior methods that take advantage of the nearest neighbors structure of the data, and uses leave-one-out cross-validation to optimize covariance (kernel) hyperparameters without realizing a possibly expensive likelihood. We describe our model and methods in detail, and compare our implementations against the state-of-the-art competitors in a benchmark spatial statistics problem. We show that our method outperforms all known competitors both in terms of time-to-solution and the root mean squared error of the predictions.
Modeling in OWL 2 without Restrictions
Apr 28, 2013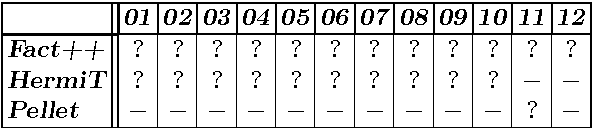
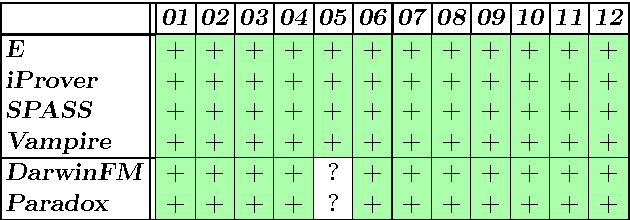
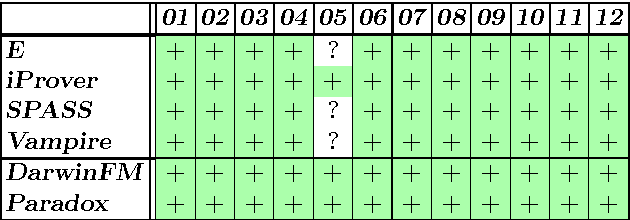
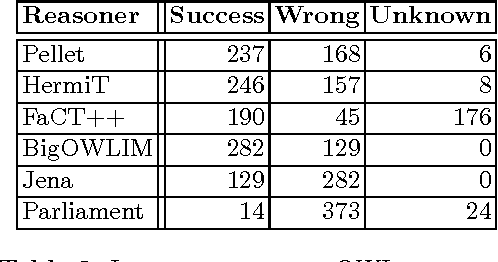
The Semantic Web ontology language OWL 2 DL comes with a variety of language features that enable sophisticated and practically useful modeling. However, the use of these features has been severely restricted in order to retain decidability of the language. For example, OWL 2 DL does not allow a property to be both transitive and asymmetric, which would be desirable, e.g., for representing an ancestor relation. In this paper, we argue that the so-called global restrictions of OWL 2 DL preclude many useful forms of modeling, by providing a catalog of basic modeling patterns that would be available in OWL 2 DL if the global restrictions were discarded. We then report on the results of evaluating several state-of-the-art OWL 2 DL reasoners on problems that use combinations of features in a way that the global restrictions are violated. The systems turn out to rely heavily on the global restrictions and are thus largely incapable of coping with the modeling patterns. Next we show how off-the-shelf first-order logic theorem proving technology can be used to perform reasoning in the OWL 2 direct semantics, the semantics that underlies OWL 2 DL, but without requiring the global restrictions. Applying a naive proof-of-concept implementation of this approach to the test problems was successful in all cases. Based on our observations, we make suggestions for future lines of research on expressive description logic-style OWL reasoning.
Reasoning in the OWL 2 Full Ontology Language using First-Order Automated Theorem Proving
Jul 31, 2011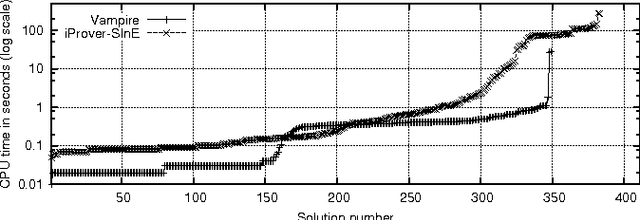
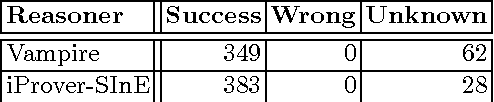
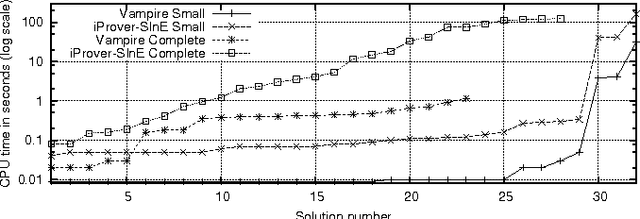
OWL 2 has been standardized by the World Wide Web Consortium (W3C) as a family of ontology languages for the Semantic Web. The most expressive of these languages is OWL 2 Full, but to date no reasoner has been implemented for this language. Consistency and entailment checking are known to be undecidable for OWL 2 Full. We have translated a large fragment of the OWL 2 Full semantics into first-order logic, and used automated theorem proving systems to do reasoning based on this theory. The results are promising, and indicate that this approach can be applied in practice for effective OWL reasoning, beyond the capabilities of current Semantic Web reasoners. This is an extended version of a paper with the same title that has been published at CADE 2011, LNAI 6803, pp. 446-460. The extended version provides appendices with additional resources that were used in the reported evaluation.