 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep-ultraviolet ptychographic pocket-scope (DART): mesoscale lensless molecular imaging with label-free spectroscopic contrast
Nov 08, 2025The mesoscale characterization of biological specimens has traditionally required compromises between resolution, field-of-view, depth-of-field, and molecular specificity, with most approaches relying on external labels. Here we present the Deep-ultrAviolet ptychogRaphic pockeT-scope (DART), a handheld platform that transforms label-free molecular imaging through intrinsic deep-ultraviolet spectroscopic contrast. By leveraging biomolecules' natural absorption fingerprints and combining them with lensless ptychographic microscopy, DART resolves down to 308-nm linewidths across centimeter-scale areas while maintaining millimeter-scale depth-of-field. The system's virtual error-bin methodology effectively eliminates artifacts from limited temporal coherence and other optical imperfections, enabling high-fidelity molecular imaging without lenses. Through differential spectroscopic imaging at deep-ultraviolet wavelengths, DART quantitatively maps nucleic acid and protein distributions with femtogram sensitivity, providing an intrinsic basis for explainable virtual staining. We demonstrate DART's capabilities through molecular imaging of tissue sections, cytopathology specimens, blood cells, and neural populations, revealing detailed molecular contrast without external labels. The combination of high-resolution molecular mapping and broad mesoscale imaging in a portable platform opens new possibilities from rapid clinical diagnostics, tissue analysis, to biological characterization in space exploration.
Cognition Envelopes for Bounded AI Reasoning in Autonomous UAS Operations
Oct 30, 2025Cyber-physical systems increasingly rely on Foundational Models such as Large Language Models (LLMs) and Vision-Language Models (VLMs) to increase autonomy through enhanced perception, inference, and planning. However, these models also introduce new types of errors, such as hallucinations, overgeneralizations, and context misalignments, resulting in incorrect and flawed decisions. To address this, we introduce the concept of Cognition Envelopes, designed to establish reasoning boundaries that constrain AI-generated decisions while complementing the use of meta-cognition and traditional safety envelopes. As with safety envelopes, Cognition Envelopes require practical guidelines and systematic processes for their definition, validation, and assurance.
Cognitive Guardrails for Open-World Decision Making in Autonomous Drone Swarms
May 29, 2025
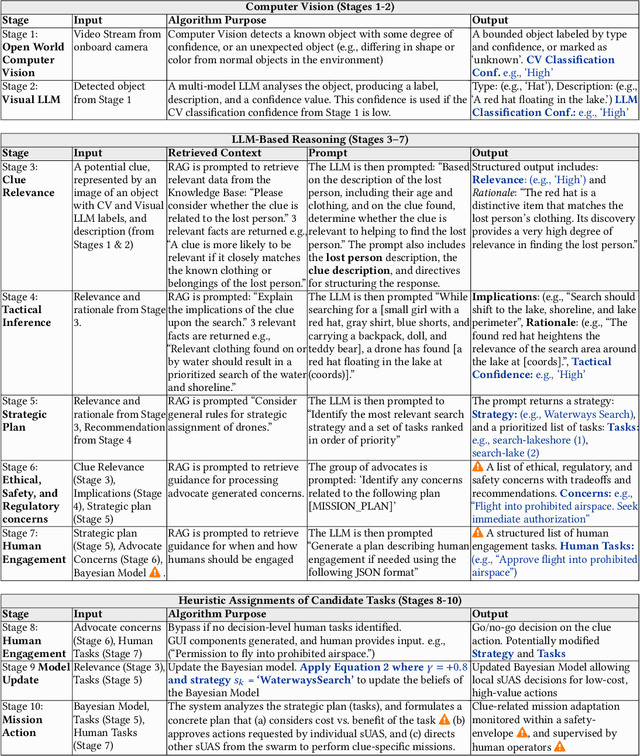
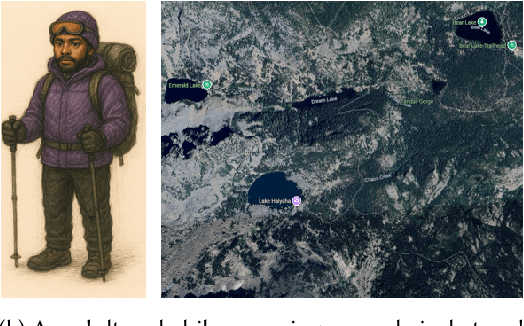
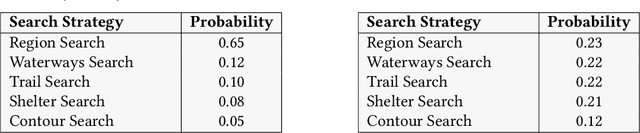
Small Uncrewed Aerial Systems (sUAS) are increasingly deployed as autonomous swarms in search-and-rescue and other disaster-response scenarios. In these settings, they use computer vision (CV) to detect objects of interest and autonomously adapt their missions. However, traditional CV systems often struggle to recognize unfamiliar objects in open-world environments or to infer their relevance for mission planning. To address this, we incorporate large language models (LLMs) to reason about detected objects and their implications. While LLMs can offer valuable insights, they are also prone to hallucinations and may produce incorrect, misleading, or unsafe recommendations. To ensure safe and sensible decision-making under uncertainty, high-level decisions must be governed by cognitive guardrails. This article presents the design, simulation, and real-world integration of these guardrails for sUAS swarms in search-and-rescue missions.
Efficiently predicting high resolution mass spectra with graph neural networks
Jan 26, 2023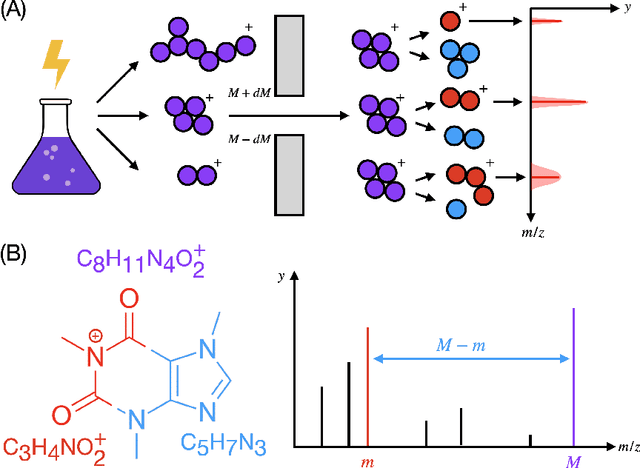
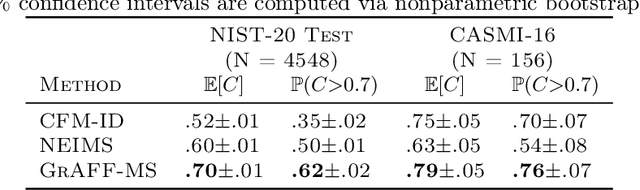
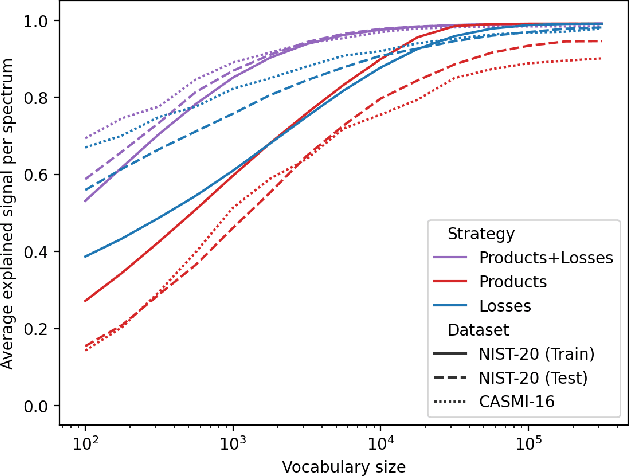
Identifying a small molecule from its mass spectrum is the primary open problem in computational metabolomics. This is typically cast as information retrieval: an unknown spectrum is matched against spectra predicted computationally from a large database of chemical structures. However, current approaches to spectrum prediction model the output space in ways that force a tradeoff between capturing high resolution mass information and tractable learning. We resolve this tradeoff by casting spectrum prediction as a mapping from an input molecular graph to a probability distribution over molecular formulas. We discover that a large corpus of mass spectra can be closely approximated using a fixed vocabulary constituting only 2% of all observed formulas. This enables efficient spectrum prediction using an architecture similar to graph classification - GrAFF-MS - achieving significantly lower prediction error and orders-of-magnitude faster runtime than state-of-the-art methods.
Extending MAPE-K to support Human-Machine Teaming
Mar 24, 2022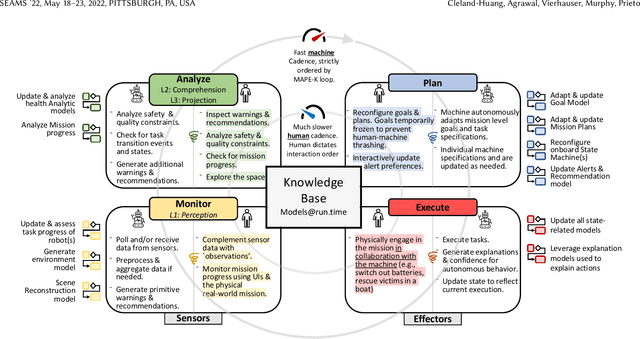
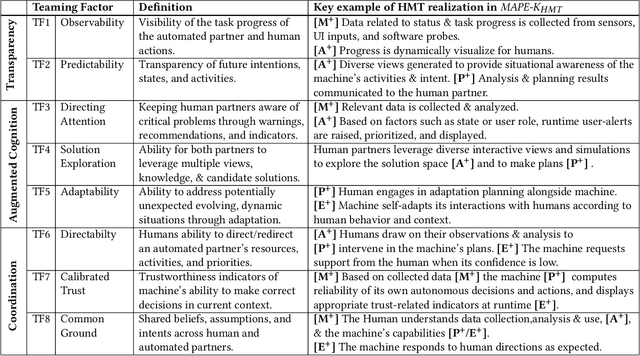

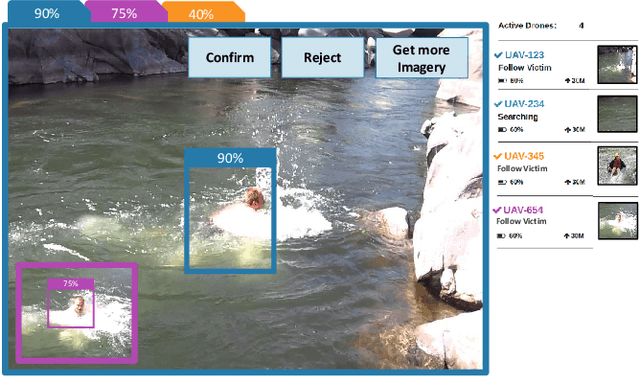
The MAPE-K feedback loop has been established as the primary reference model for self-adaptive and autonomous systems in domains such as autonomous driving, robotics, and Cyber-Physical Systems. At the same time, the Human Machine Teaming (HMT) paradigm is designed to promote partnerships between humans and autonomous machines. It goes far beyond the degree of collaboration expected in human-on-the-loop and human-in-the-loop systems and emphasizes interactions, partnership, and teamwork between humans and machines. However, while MAPE-K enables fully autonomous behavior, it does not explicitly address the interactions between humans and machines as intended by HMT. In this paper, we present the MAPE-K-HMT framework which augments the traditional MAPE-K loop with support for HMT. We identify critical human-machine teaming factors and describe the infrastructure needed across the various phases of the MAPE-K loop in order to effectively support HMT. This includes runtime models that are constructed and populated dynamically across monitoring, analysis, planning, and execution phases to support human-machine partnerships. We illustrate MAPE-K-HMT using examples from an autonomous multi-UAV emergency response system, and present guidelines for integrating HMT into MAPE-K.