 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Can You Say to a Robot? Capability Communication Leads to More Natural Conversations
Feb 03, 2025
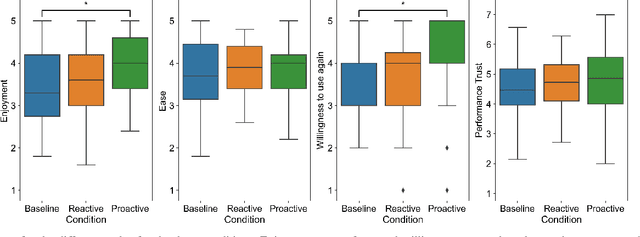
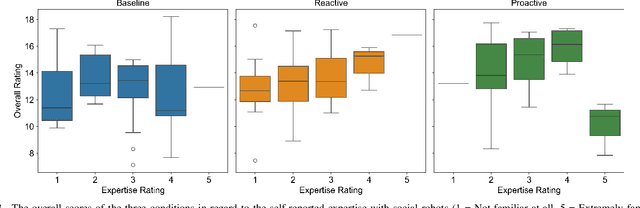
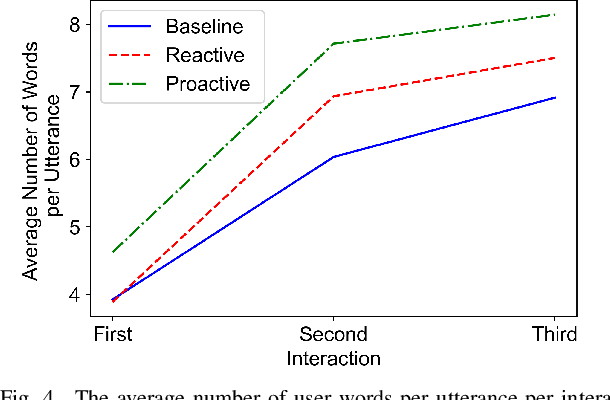
When encountering a robot in the wild, it is not inherently clear to human users what the robot's capabilities are. When encountering misunderstandings or problems in spoken interaction, robots often just apologize and move on, without additional effort to make sure the user understands what happened. We set out to compare the effect of two speech based capability communication strategies (proactive, reactive) to a robot without such a strategy, in regard to the user's rating of and their behavior during the interaction. For this, we conducted an in-person user study with 120 participants who had three speech-based interactions with a social robot in a restaurant setting. Our results suggest that users preferred the robot communicating its capabilities proactively and adjusted their behavior in those interactions, using a more conversational interaction style while also enjoying the interaction more.
A Survey on Dialogue Management in Human-Robot Interaction
Jul 20, 2023



As social robots see increasing deployment within the general public, improving the interaction with those robots is essential. Spoken language offers an intuitive interface for the human-robot interaction (HRI), with dialogue management (DM) being a key component in those interactive systems. Yet, to overcome current challenges and manage smooth, informative and engaging interaction a more structural approach to combining HRI and DM is needed. In this systematic review, we analyse the current use of DM in HRI and focus on the type of dialogue manager used, its capabilities, evaluation methods and the challenges specific to DM in HRI. We identify the challenges and current scientific frontier related to the DM approach, interaction domain, robot appearance, physical situatedness and multimodality.