 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Multitarget Detection and Tracking with mmWave Radar
Dec 23, 2024



Accurate targets detection and tracking with mmWave radar is a key sensing capability that will enable more intelligent systems, create smart, efficient, automated system. This paper proposes an end-to-end detection-estimation-track framework named MNOMP-SPA-KF consisting of the target detection and estimation module, the data association (DA) module and the target tracking module. In the target estimation and detection module, a low complexity, super-resolution and constant false alarm rate (CFAR) based two dimensional multisnapshot Newtonalized orthogonal matching pursuit (2D-MNOMP) is designed to extract the multitarget's radial distances and velocities, followed by the conventional (Bartlett) beamformer to extract the multitarget's azimuths. In the DA module, a sum product algorithm (SPA) is adopted to obtain the association probabilities of the existed targets and measurements by incorporating the radial velocity information. The Kalman filter (KF) is implemented to perform target tracking in the target tracking module by exploiting the asymptotic distribution of the estimators. To improve the detection probability of the weak targets, extrapolation is also coupled into the MNOMP-SPA-KF. Numerical and real data experiments demonstrate the effectiveness of the MNOMP-SPA-KF algorithm, compared to other benchmark algorithms.
CFAR based NOMP for Line Spectral Estimation and Detection
Oct 19, 2022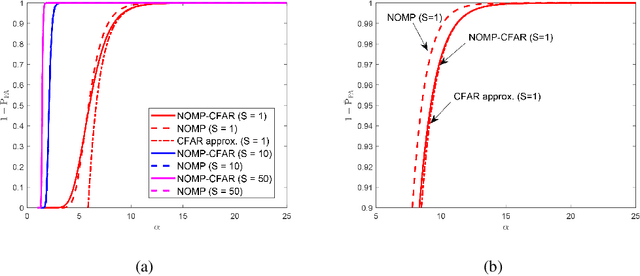
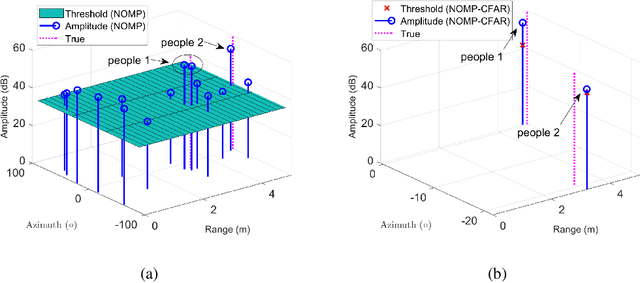
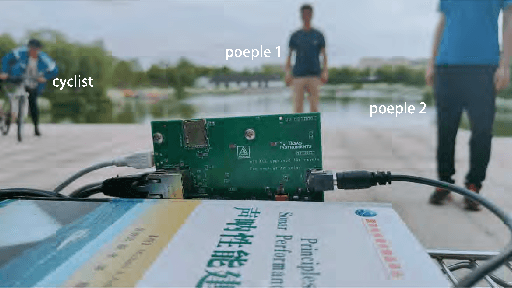
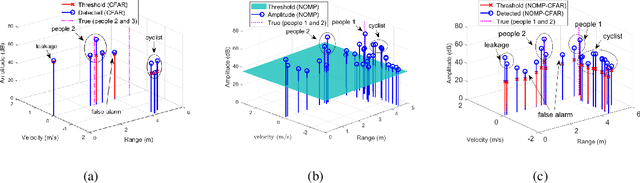
The line spectrum estimation problem is considered in this paper. We propose a CFAR-based Newtonized OMP (NOMP-CFAR) method which can maintain a desired false alarm rate without the knowledge of the noise variance. The NOMP-CFAR consists of two steps, namely, an initialization step and a detection step. In the initialization step, NOMP is employed to obtain candidate sinusoidal components. In the detection step, CFAR detector is applied to detect each candidate frequency, and remove the most unlikely frequency component. Then, the Newton refinements are used to refine the remaining parameters. The relationship between the false alarm rate and the required threshold is established. By comparing with the NOMP, NOMP-CFAR has only $1$ dB performance loss in additive white Gaussian noise scenario with false alarm probability $10^{-2}$ and detection probability $0.8$ without knowledge of noise variance. For varied noise variance scenario, NOMP-CFAR still preserves its CFAR property, while NOMP violates the CFAR. Besides, real experiments are also conducted to demonstrate the detection performance of NOMP-CFAR, compared to CFAR and NOMP.