 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots in healthcare as envisioned by care professionals
Jun 01, 2022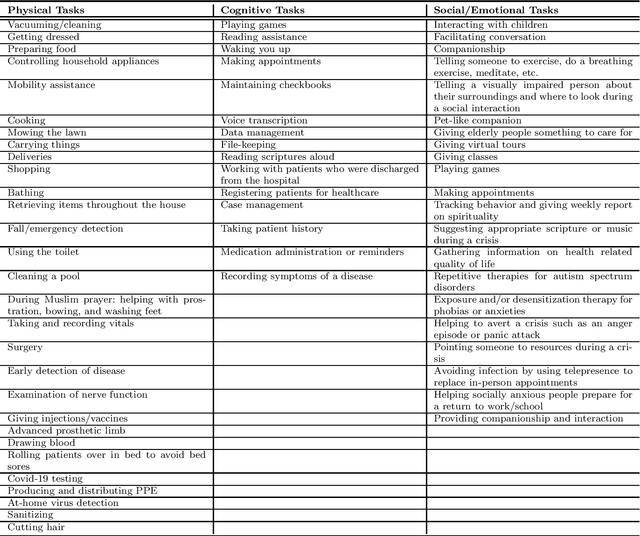
As AI-enabled robots enter the realm of healthcare and caregiving, it is important to consider how they will address the dimensions of care and how they will interact not just with the direct receivers of assistance, but also with those who provide it (e.g., caregivers, healthcare providers etc.). Caregiving in its best form addresses challenges in a multitude of dimensions of a person's life: from physical, to social-emotional and sometimes even existential dimensions (such as issues surrounding life and death). In this study we use semi-structured qualitative interviews administered to healthcare professions with multidisciplinary backgrounds (physicians, public health professionals, social workers, and chaplains) to understand their expectations regarding the possible roles robots may play in the healthcare ecosystem in the future. We found that participants drew inspiration in their mental models of robots from both works of science fiction but also from existing commercial robots. Participants envisioned roles for robots in the full spectrum of care, from physical to social-emotional and even existential-spiritual dimensions, but also pointed out numerous limitations that robots have in being able to provide comprehensive humanistic care. While no dimension of care was deemed as exclusively the realm of humans, participants stressed the importance of caregiving humans as the primary providers of comprehensive care, with robots assisting with more narrowly focused tasks. Throughout the paper we point out the encouraging confluence of ideas between the expectations of healthcare providers and research trends in the human-robot interaction (HRI) literature.
Can You Trust Your Trust Measure?
Apr 23, 2021
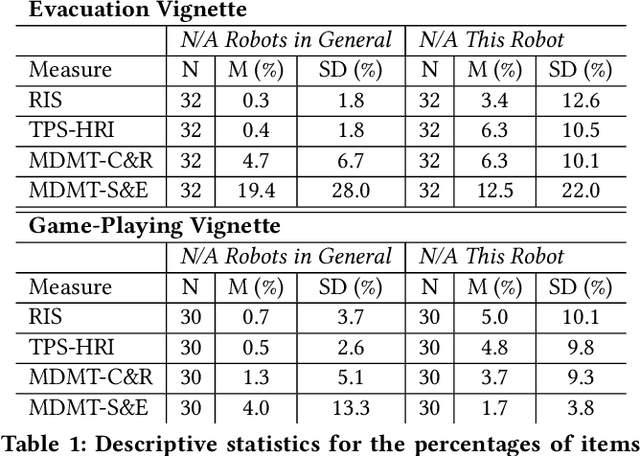
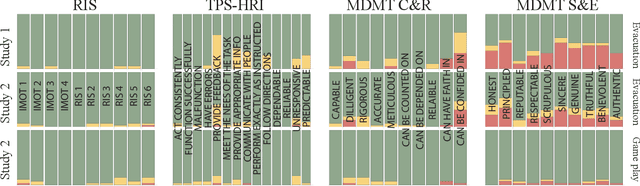
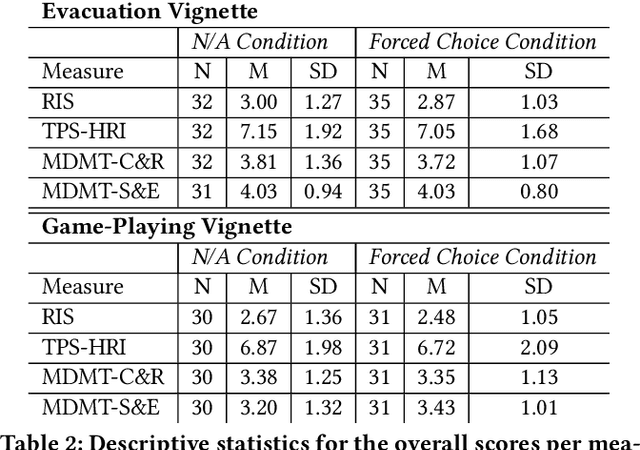
Trust in human-robot interactions (HRI) is measured in two main ways: through subjective questionnaires and through behavioral tasks. To optimize measurements of trust through questionnaires, the field of HRI faces two challenges: the development of standardized measures that apply to a variety of robots with different capabilities, and the exploration of social and relational dimensions of trust in robots (e.g., benevolence). In this paper we look at how different trust questionnaires fare given these challenges that pull in different directions (being general vs. being exploratory) by studying whether people think the items in these questionnaires are applicable to different kinds of robots and interactions. In Study 1 we show that after being presented with a robot (non-humanoid) and an interaction scenario (fire evacuation), participants rated multiple questionnaire items such as "This robot is principled" as "Non-applicable to robots in general" or "Non-applicable to this robot". In Study 2 we show that the frequency of these ratings change (indeed, even for items rated as N/A to robots in general) when a new scenario is presented (game playing with a humanoid robot). Finally, while overall trust scores remained robust to N/A ratings, our results revealed potential fallacies in the way these scores are commonly interpreted. We conclude with recommendations for the development, use and results-reporting of trust questionnaires for future studies, as well as theoretical implications for the field of HRI.
* 9 pages
Assistive robots for the social management of health: a framework for robot design and human-robot interaction research
Feb 08, 2020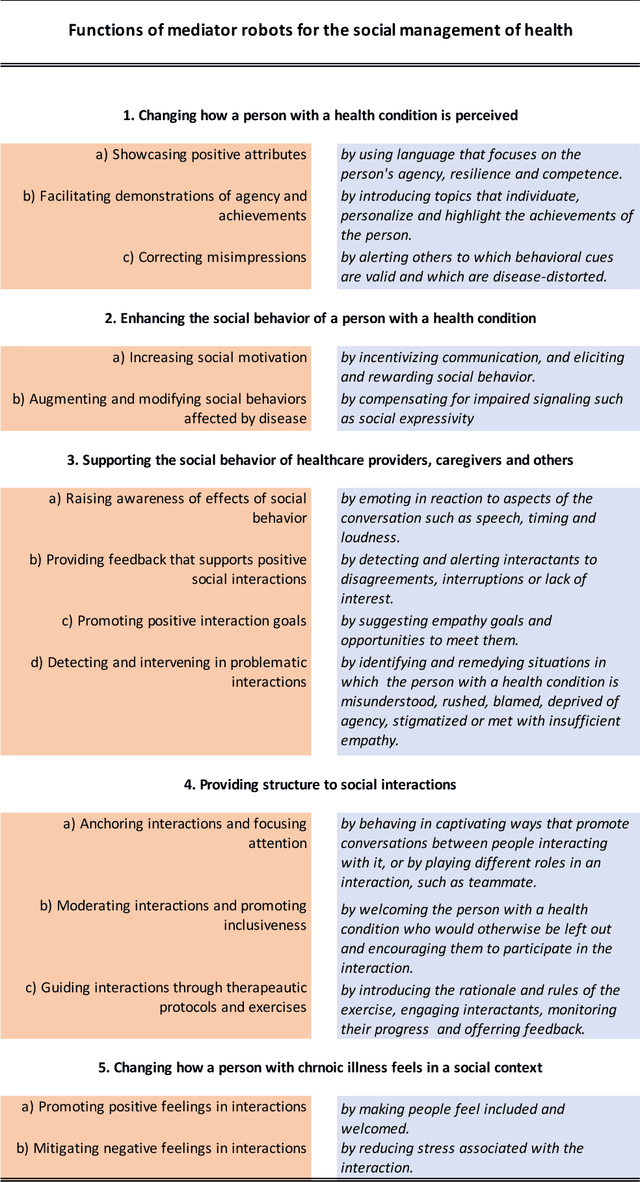
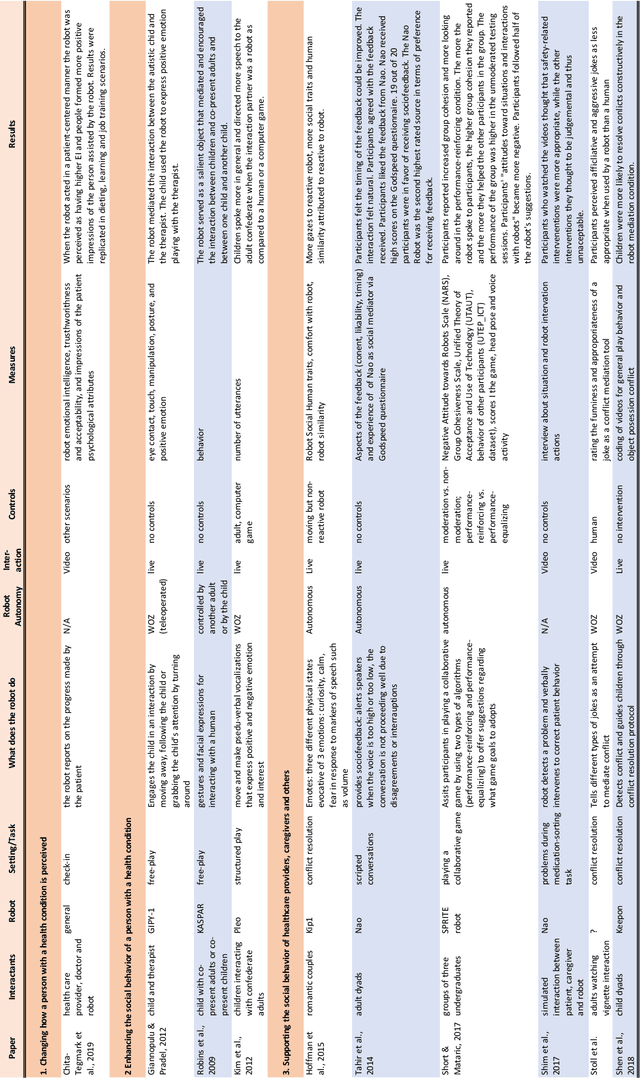
There is a close connection between health and the quality of one's social life. Strong social bonds are essential for health and wellbeing, but often health conditions can detrimentally affect a person's ability to interact with others. This can become a vicious cycle resulting in further decline in health. For this reason, the social management of health is an important aspect of healthcare. We propose that socially assistive robots (SARs) could help people with health conditions maintain positive social lives by supporting them in social interactions. This paper makes three contributions, as detailed below. We develop a framework of social mediation functions that robots could perform, motivated by the special social needs that people with health conditions have. In this framework we identify five types of functions that SARs could perform: a) changing how the person is perceived, b) enhancing the social behavior of the person, c) modifying the social behavior of others, d) providing structure for interactions, and e) changing how the person feels. We thematically organize and review the existing literature on robots supporting human-human interactions, in both clinical and non-clinical settings, and explain how the findings and design ideas from these studies can be applied to the functions identified in the framework. Finally, we point out and discuss challenges in designing SARs for supporting social interactions, and highlight opportunities for future robot design and HRI research on the mediator role of robots.
Generating Justifications for Norm-Related Agent Decisions
Nov 01, 2019
We present an approach to generating natural language justifications of decisions derived from norm-based reasoning. Assuming an agent which maximally satisfies a set of rules specified in an object-oriented temporal logic, the user can ask factual questions (about the agent's rules, actions, and the extent to which the agent violated the rules) as well as "why" questions that require the agent comparing actual behavior to counterfactual trajectories with respect to these rules. To produce natural-sounding explanations, we focus on the subproblem of producing natural language clauses from statements in a fragment of temporal logic, and then describe how to embed these clauses into explanatory sentences. We use a human judgment evaluation on a testbed task to compare our approach to variants in terms of intelligibility, mental model and perceived trust.