 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision-Theoretic Question Generation for Situated Reference Resolution: An Empirical Study and Computational Model
Oct 12, 2021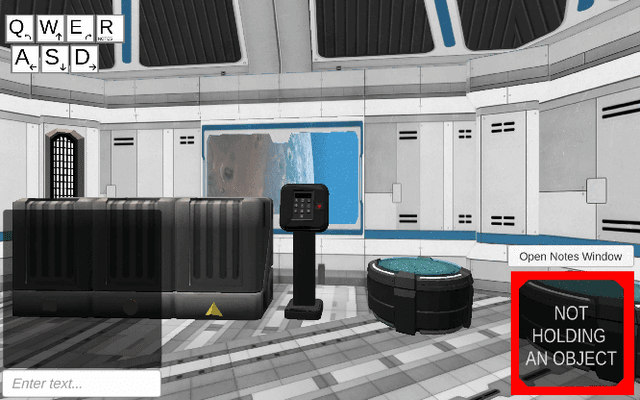

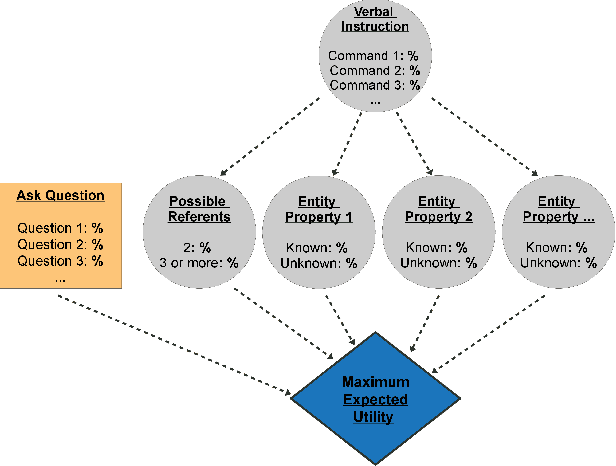
Dialogue agents that interact with humans in situated environments need to manage referential ambiguity across multiple modalities and ask for help as needed. However, it is not clear what kinds of questions such agents should ask nor how the answers to such questions can be used to resolve ambiguity. To address this, we analyzed dialogue data from an interactive study in which participants controlled a virtual robot tasked with organizing a set of tools while engaging in dialogue with a live, remote experimenter. We discovered a number of novel results, including the distribution of question types used to resolve ambiguity and the influence of dialogue-level factors on the reference resolution process. Based on these empirical findings we: (1) developed a computational model for clarification requests using a decision network with an entropy-based utility assignment method that operates across modalities, (2) evaluated the model, showing that it outperforms a slot-filling baseline in environments of varying ambiguity, and (3) interpreted the results to offer insight into the ways that agents can ask questions to facilitate situated reference resolution.
How Should Agents Ask Questions For Situated Learning? An Annotated Dialogue Corpus
Jun 11, 2021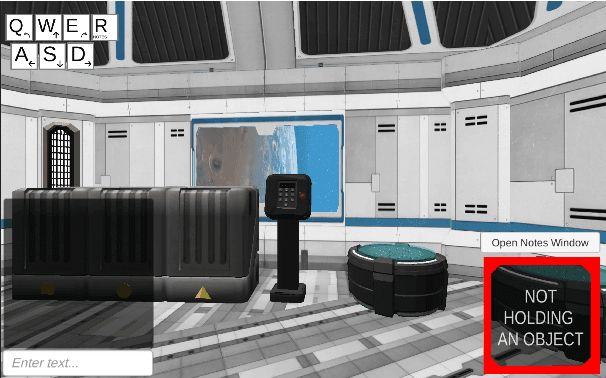
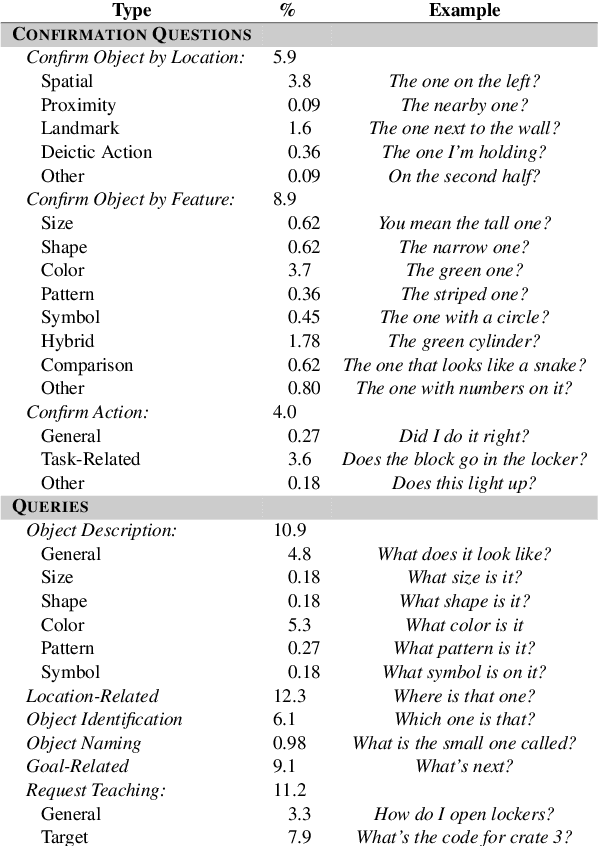
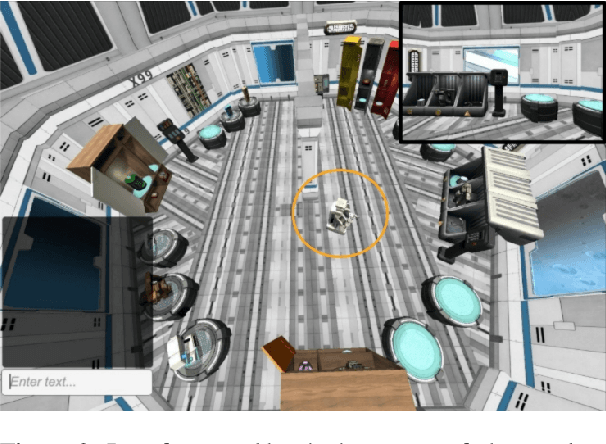
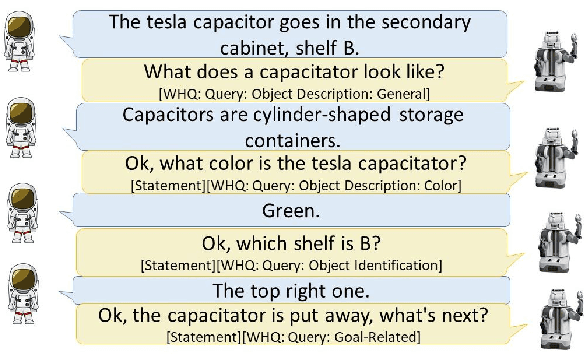
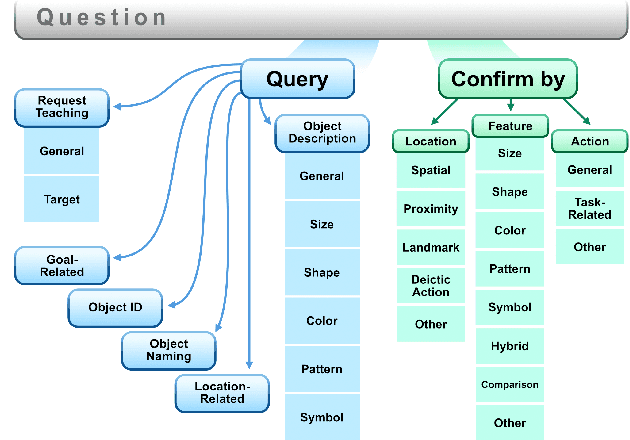
Intelligent agents that are confronted with novel concepts in situated environments will need to ask their human teammates questions to learn about the physical world. To better understand this problem, we need data about asking questions in situated task-based interactions. To this end, we present the Human-Robot Dialogue Learning (HuRDL) Corpus - a novel dialogue corpus collected in an online interactive virtual environment in which human participants play the role of a robot performing a collaborative tool-organization task. We describe the corpus data and a corresponding annotation scheme to offer insight into the form and content of questions that humans ask to facilitate learning in a situated environment. We provide the corpus as an empirically-grounded resource for improving question generation in situated intelligent agents.
Engaging in Dialogue about an Agent's Norms and Behaviors
Nov 01, 2019
We present a set of capabilities allowing an agent planning with moral and social norms represented in temporal logic to respond to queries about its norms and behaviors in natural language, and for the human user to add and remove norms directly in natural language. The user may also pose hypothetical modifications to the agent's norms and inquire about their effects.
Generating Justifications for Norm-Related Agent Decisions
Nov 01, 2019
We present an approach to generating natural language justifications of decisions derived from norm-based reasoning. Assuming an agent which maximally satisfies a set of rules specified in an object-oriented temporal logic, the user can ask factual questions (about the agent's rules, actions, and the extent to which the agent violated the rules) as well as "why" questions that require the agent comparing actual behavior to counterfactual trajectories with respect to these rules. To produce natural-sounding explanations, we focus on the subproblem of producing natural language clauses from statements in a fragment of temporal logic, and then describe how to embed these clauses into explanatory sentences. We use a human judgment evaluation on a testbed task to compare our approach to variants in terms of intelligibility, mental model and perceived trust.