 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAugmented Conversation with Embedded Speech-Driven On-the-Fly Referencing in AR
May 28, 2024
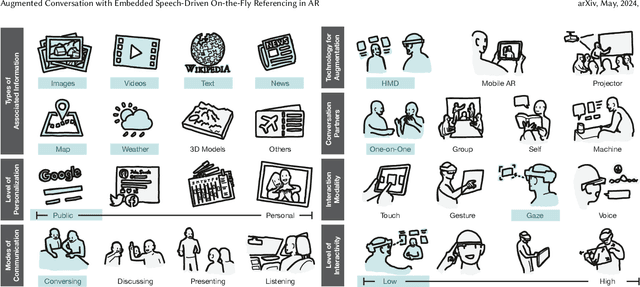
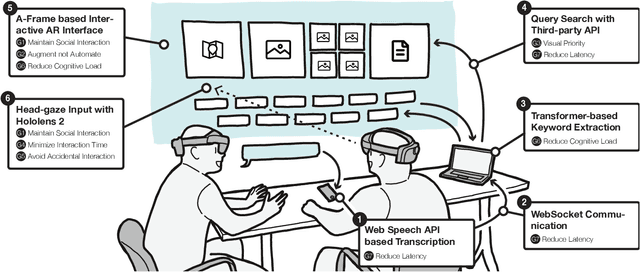
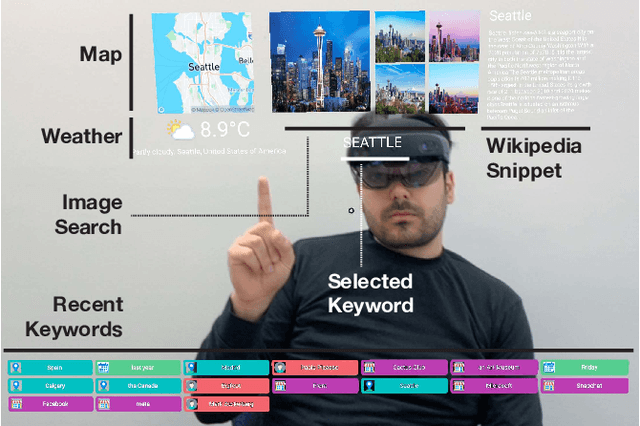
This paper introduces the concept of augmented conversation, which aims to support co-located in-person conversations via embedded speech-driven on-the-fly referencing in augmented reality (AR). Today computing technologies like smartphones allow quick access to a variety of references during the conversation. However, these tools often create distractions, reducing eye contact and forcing users to focus their attention on phone screens and manually enter keywords to access relevant information. In contrast, AR-based on-the-fly referencing provides relevant visual references in real-time, based on keywords extracted automatically from the spoken conversation. By embedding these visual references in AR around the conversation partner, augmented conversation reduces distraction and friction, allowing users to maintain eye contact and supporting more natural social interactions. To demonstrate this concept, we developed \system, a Hololens-based interface that leverages real-time speech recognition, natural language processing and gaze-based interactions for on-the-fly embedded visual referencing. In this paper, we explore the design space of visual referencing for conversations, and describe our our implementation -- building on seven design guidelines identified through a user-centered design process. An initial user study confirms that our system decreases distraction and friction in conversations compared to smartphone searches, while providing highly useful and relevant information.
HoloBots: Augmenting Holographic Telepresence with Mobile Robots for Tangible Remote Collaboration in Mixed Reality
Jul 30, 2023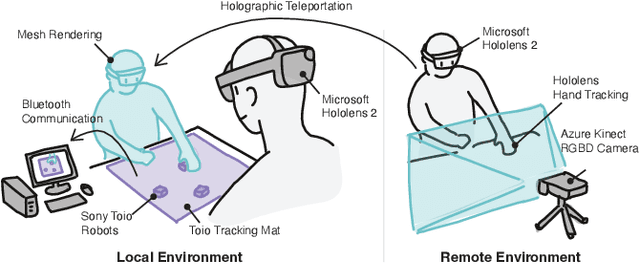
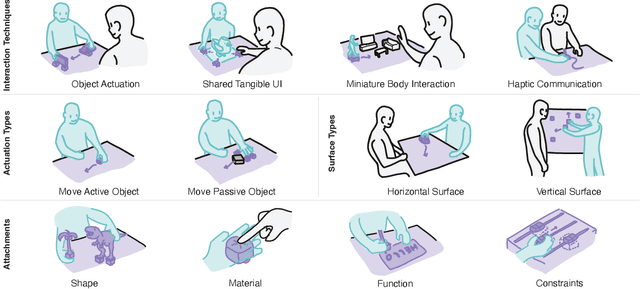

This paper introduces HoloBots, a mixed reality remote collaboration system that augments holographic telepresence with synchronized mobile robots. Beyond existing mixed reality telepresence, HoloBots lets remote users not only be visually and spatially present, but also physically engage with local users and their environment. HoloBots allows the users to touch, grasp, manipulate, and interact with the remote physical environment as if they were co-located in the same shared space. We achieve this by synchronizing holographic user motion (Hololens 2 and Azure Kinect) with tabletop mobile robots (Sony Toio). Beyond the existing physical telepresence, HoloBots contributes to an exploration of broader design space, such as object actuation, virtual hand physicalization, world-in-miniature exploration, shared tangible interfaces, embodied guidance, and haptic communication. We evaluate our system with twelve participants by comparing it with hologram-only and robot-only conditions. Both quantitative and qualitative results confirm that our system significantly enhances the level of co-presence and shared experience, compared to the other conditions.
UltraBots: Large-Area Mid-Air Haptics for VR with Robotically Actuated Ultrasound Transducers
Oct 04, 2022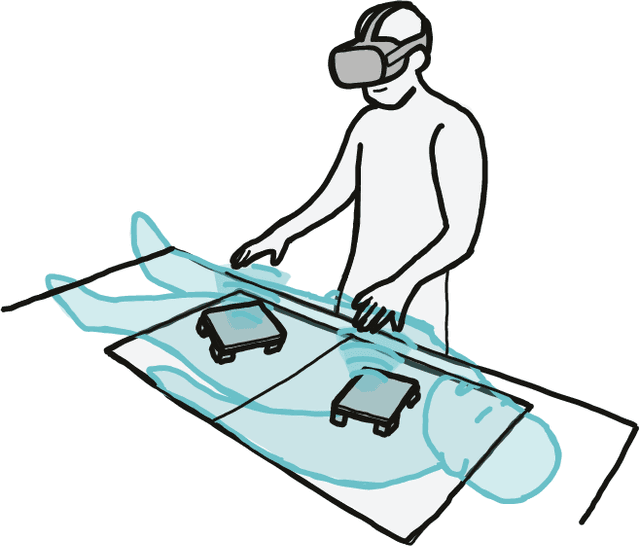
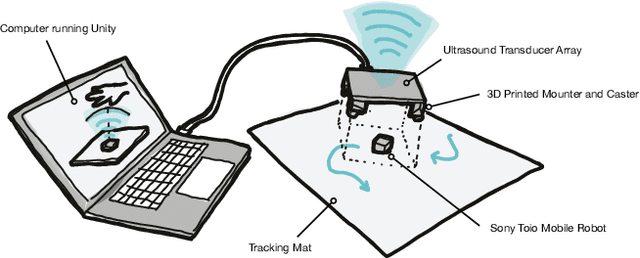
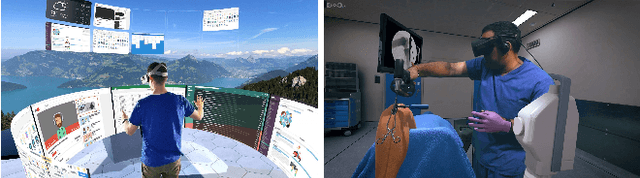
We introduce UltraBots, a system that combines ultrasound haptic feedback and robotic actuation for large-area mid-air haptics for VR. Ultrasound haptics can provide precise mid-air haptic feedback and versatile shape rendering, but the interaction area is often limited by the small size of the ultrasound devices, restricting the possible interactions for VR. To address this problem, this paper introduces a novel approach that combines robotic actuation with ultrasound haptics. More specifically, we will attach ultrasound transducer arrays to tabletop mobile robots or robotic arms for scalable, extendable, and translatable interaction areas. We plan to use Sony Toio robots for 2D translation and/or commercially available robotic arms for 3D translation. Using robotic actuation and hand tracking measured by a VR HMD (e.g., Oculus Quest), our system can keep the ultrasound transducers underneath the user's hands to provide on-demand haptics. We demonstrate applications with workspace environments, medical training, education and entertainment.
Sketched Reality: Sketching Bi-Directional Interactions Between Virtual and Physical Worlds with AR and Actuated Tangible UI
Aug 12, 2022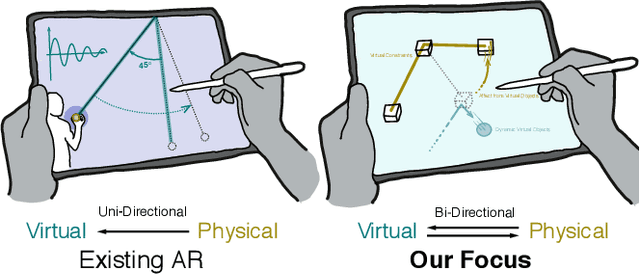
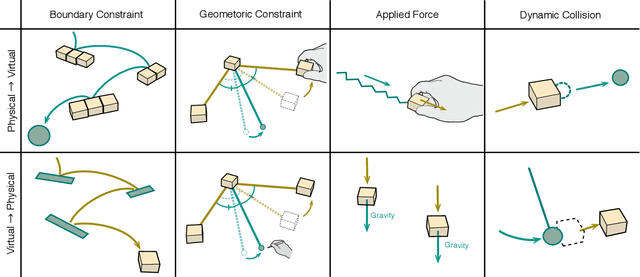
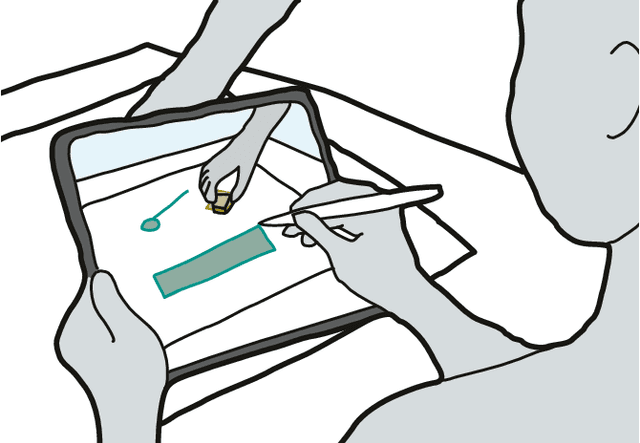
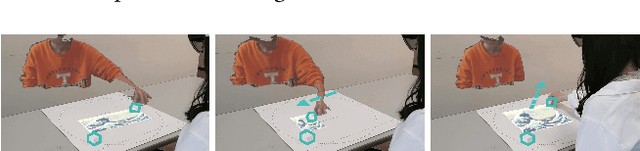
This paper introduces Sketched Reality, an approach that combines AR sketching and actuated tangible user interfaces (TUI) for bidirectional sketching interaction. Bi-directional sketching enables virtual sketches and physical objects to "affect" each other through physical actuation and digital computation. In the existing AR sketching, the relationship between virtual and physical worlds is only one-directional -- while physical interaction can affect virtual sketches, virtual sketches have no return effect on the physical objects or environment. In contrast, bi-directional sketching interaction allows the seamless coupling between sketches and actuated TUIs. In this paper, we employ tabletop-size small robots (Sony Toio) and an iPad-based AR sketching tool to demonstrate the concept. In our system, virtual sketches drawn and simulated on an iPad (e.g., lines, walls, pendulums, and springs) can move, actuate, collide, and constrain physical Toio robots, as if virtual sketches and the physical objects exist in the same space through seamless coupling between AR and robot motion. This paper contributes a set of novel interactions and a design space of bi-directional AR sketching. We demonstrate a series of potential applications, such as tangible physics education, explorable mechanism, tangible gaming for children, and in-situ robot programming via sketching.