 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFacilitating Longitudinal Interaction Studies of AI Systems
Aug 14, 2025UIST researchers develop tools to address user challenges. However, user interactions with AI evolve over time through learning, adaptation, and repurposing, making one time evaluations insufficient. Capturing these dynamics requires longer-term studies, but challenges in deployment, evaluation design, and data collection have made such longitudinal research difficult to implement. Our workshop aims to tackle these challenges and prepare researchers with practical strategies for longitudinal studies. The workshop includes a keynote, panel discussions, and interactive breakout groups for discussion and hands-on protocol design and tool prototyping sessions. We seek to foster a community around longitudinal system research and promote it as a more embraced method for designing, building, and evaluating UIST tools.
SHAPE-IT: Exploring Text-to-Shape-Display for Generative Shape-Changing Behaviors with LLMs
Sep 10, 2024



This paper introduces text-to-shape-display, a novel approach to generating dynamic shape changes in pin-based shape displays through natural language commands. By leveraging large language models (LLMs) and AI-chaining, our approach allows users to author shape-changing behaviors on demand through text prompts without programming. We describe the foundational aspects necessary for such a system, including the identification of key generative elements (primitive, animation, and interaction) and design requirements to enhance user interaction, based on formative exploration and iterative design processes. Based on these insights, we develop SHAPE-IT, an LLM-based authoring tool for a 24 x 24 shape display, which translates the user's textual command into executable code and allows for quick exploration through a web-based control interface. We evaluate the effectiveness of SHAPE-IT in two ways: 1) performance evaluation and 2) user evaluation (N= 10). The study conclusions highlight the ability to facilitate rapid ideation of a wide range of shape-changing behaviors with AI. However, the findings also expose accuracy-related challenges and limitations, prompting further exploration into refining the framework for leveraging AI to better suit the unique requirements of shape-changing systems.
CARDinality: Interactive Card-shaped Robots with Locomotion and Haptics using Vibration
Sep 08, 2024



This paper introduces a novel approach to interactive robots by leveraging the form-factor of cards to create thin robots equipped with vibrational capabilities for locomotion and haptic feedback. The system is composed of flat-shaped robots with on-device sensing and wireless control, which offer lightweight portability and scalability. This research introduces a hardware prototype. Applications include augmented card playing, educational tools, and assistive technology, which showcase CARDinality's versatility in tangible interaction.
Sketched Reality: Sketching Bi-Directional Interactions Between Virtual and Physical Worlds with AR and Actuated Tangible UI
Aug 12, 2022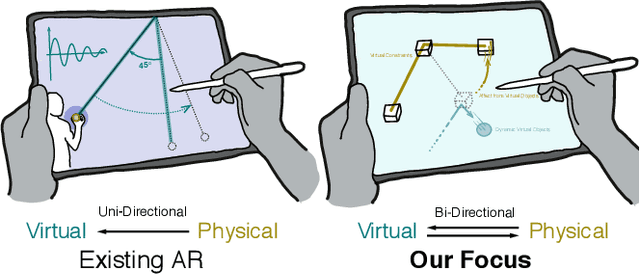
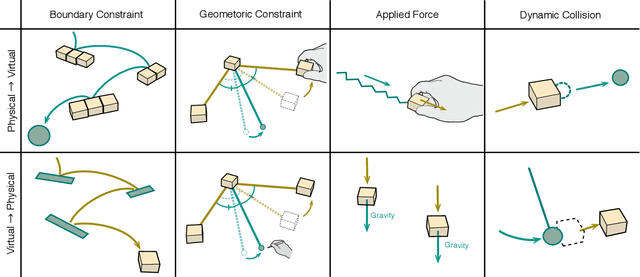
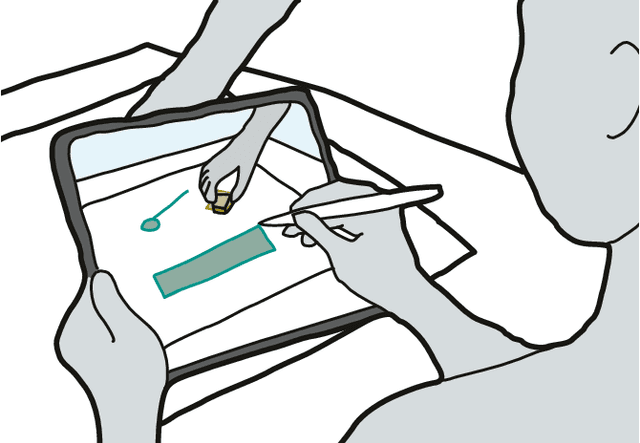
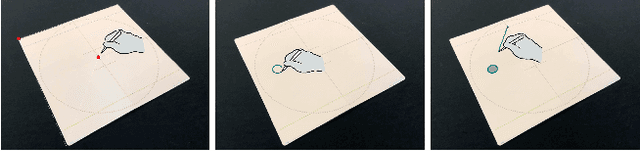
This paper introduces Sketched Reality, an approach that combines AR sketching and actuated tangible user interfaces (TUI) for bidirectional sketching interaction. Bi-directional sketching enables virtual sketches and physical objects to "affect" each other through physical actuation and digital computation. In the existing AR sketching, the relationship between virtual and physical worlds is only one-directional -- while physical interaction can affect virtual sketches, virtual sketches have no return effect on the physical objects or environment. In contrast, bi-directional sketching interaction allows the seamless coupling between sketches and actuated TUIs. In this paper, we employ tabletop-size small robots (Sony Toio) and an iPad-based AR sketching tool to demonstrate the concept. In our system, virtual sketches drawn and simulated on an iPad (e.g., lines, walls, pendulums, and springs) can move, actuate, collide, and constrain physical Toio robots, as if virtual sketches and the physical objects exist in the same space through seamless coupling between AR and robot motion. This paper contributes a set of novel interactions and a design space of bi-directional AR sketching. We demonstrate a series of potential applications, such as tangible physics education, explorable mechanism, tangible gaming for children, and in-situ robot programming via sketching.