 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoFEE: Reasoning Control for LLM-Based Feature Discovery
Apr 23, 2026Feature discovery from complex unstructured data is fundamentally a reasoning problem: it requires identifying abstractions that are predictive of a target outcome while avoiding leakage, proxies, and post-outcome signals. With the introduction of ever-improving Large Language Models (LLMs), our method provides a structured method for addressing this challenge. LLMs are well suited for this task by being able to process large amounts of information, but unconstrained feature generation can lead to weak features. In this work, we study reasoning control in LLMs by inducing cognitive behaviors for improving feature discovery. We introduce CoFEE (Cognitive Feature Engineering Engine), a reasoning control framework that enforces cognitive behaviors in how the LLM reasons during feature discovery. From a machine learning perspective, these cognitive behaviors act as structured inductive biases over the space of candidate features generated by the model. These behaviors have been exploited with success in ML models, and include backward chaining from outcomes, subgoal decomposition, verification against observability and leakage criteria, and explicit backtracking of rejected reasoning paths. In a controlled comparison, we show that enforcing cognitive behaviors yields features with higher empirical predictability than those under unconstrained vanilla LLM prompts. CoFEE achieves an average Success Rate Score that is 15.2% higher than the vanilla approach, while generating 29% fewer features and reducing costs by 53.3%. Using held-out feature evaluation, we assess whether cognitively induced features generalize beyond the data used for discovery. Our results indicate that, in our evaluated setting, reasoning control is associated with improvements in quality and efficiency of LLM-based feature discovery.
Compliant Beaded-String Jamming For Variable Stiffness Anthropomorphic Fingers
Feb 06, 2025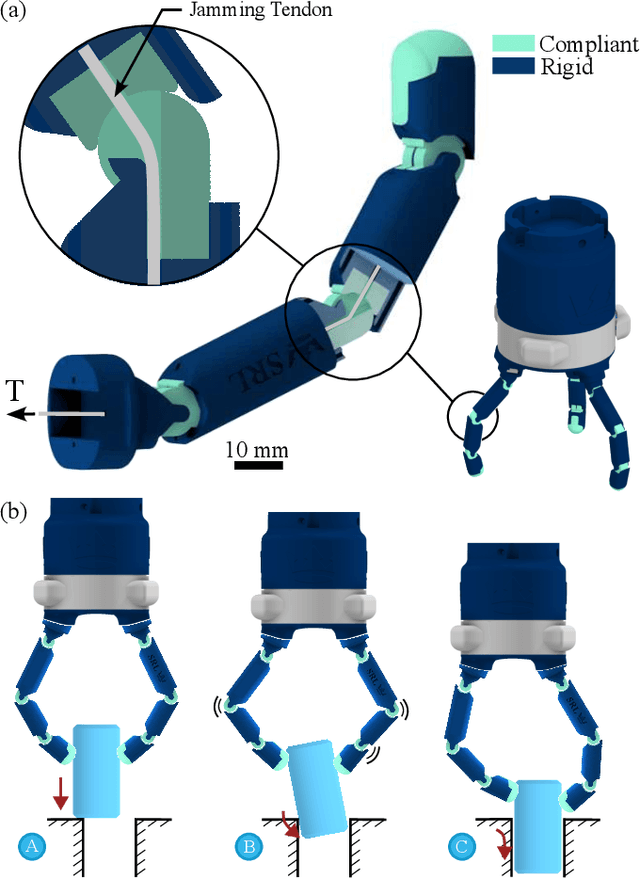
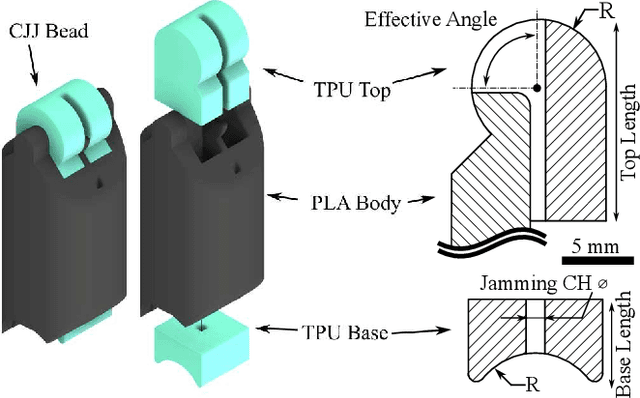
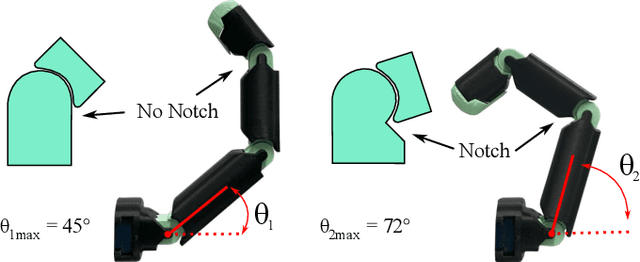
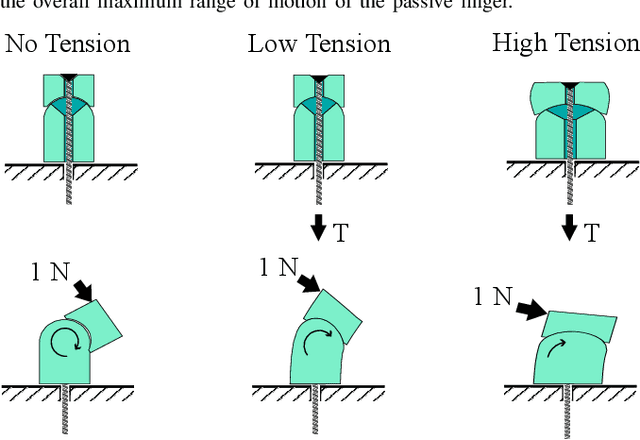
Achieving human-like dexterity in robotic grippers remains an open challenge, particularly in ensuring robust manipulation in uncertain environments. Soft robotic hands try to address this by leveraging passive compliance, a characteristic that is crucial to the adaptability of the human hand, to achieve more robust manipulation while reducing reliance on high-resolution sensing and complex control. Further improvements in terms of precision and postural stability in manipulation tasks are achieved through the integration of variable stiffness mechanisms, but these tend to lack residual compliance, be bulky and have slow response times. To address these limitations, this work introduces a Compliant Joint Jamming mechanism for anthropomorphic fingers that exhibits passive residual compliance and adjustable stiffness, while achieving a range of motion in line with that of human interphalangeal joints. The stiffness range provided by the mechanism is controllable from 0.48 Nm/rad to 1.95 Nm/rad (a 4x increase). Repeatability, hysteresis and stiffness were also characterized as a function of the jamming force. To demonstrate the importance of the passive residual compliance afforded by the proposed system, a peg-in-hole task was conducted, which showed a 60% higher success rate for a gripper integrating our joint design when compared to a rigid one.
JAMMit! Monolithic 3D-Printing of a Bead Jamming Soft Pneumatic Arm
Feb 05, 20253D-printed bellow soft pneumatic arms are widely adopted for their flexible design, ease of fabrication, and large deformation capabilities. However, their low stiffness limits their real-world applications. Although several methods exist to enhance the stiffness of soft actuators, many involve complex manufacturing processes not in line with modern goals of monolithic and automated additive manufacturing. With its simplicity, bead-jamming represents a simple and effective solution to these challenges. This work introduces a method for monolithic printing of a bellow soft pneumatic arm, integrating a tendon-driven central spine of bowl-shaped beads. We experimentally characterized the arm's range of motion in both unjammed and jammed states, as well as its stiffness under various actuation and jamming conditions. As a result, we provide an optimal jamming policy as a trade-off between preserving the range of motion and maximizing stiffness. The proposed design was further demonstrated in a switch-toggling task, showing its potential for practical applications.