 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan we make NeRF-based visual localization privacy-preserving?
Aug 26, 2025Visual localization (VL) is the task of estimating the camera pose in a known scene. VL methods, a.o., can be distinguished based on how they represent the scene, e.g., explicitly through a (sparse) point cloud or a collection of images or implicitly through the weights of a neural network. Recently, NeRF-based methods have become popular for VL. While NeRFs offer high-quality novel view synthesis, they inadvertently encode fine scene details, raising privacy concerns when deployed in cloud-based localization services as sensitive information could be recovered. In this paper, we tackle this challenge on two ends. We first propose a new protocol to assess privacy-preservation of NeRF-based representations. We show that NeRFs trained with photometric losses store fine-grained details in their geometry representations, making them vulnerable to privacy attacks, even if the head that predicts colors is removed. Second, we propose ppNeSF (Privacy-Preserving Neural Segmentation Field), a NeRF variant trained with segmentation supervision instead of RGB images. These segmentation labels are learned in a self-supervised manner, ensuring they are coarse enough to obscure identifiable scene details while remaining discriminativeness in 3D. The segmentation space of ppNeSF can be used for accurate visual localization, yielding state-of-the-art results.
Self-supervised Learning of Neural Implicit Feature Fields for Camera Pose Refinement
Jun 12, 2024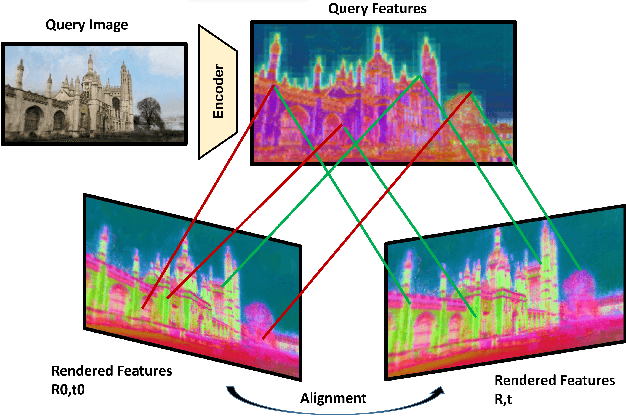
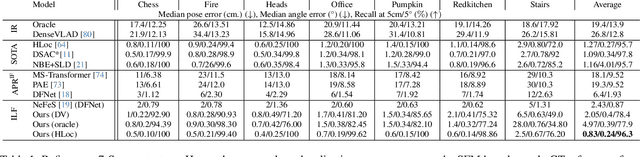
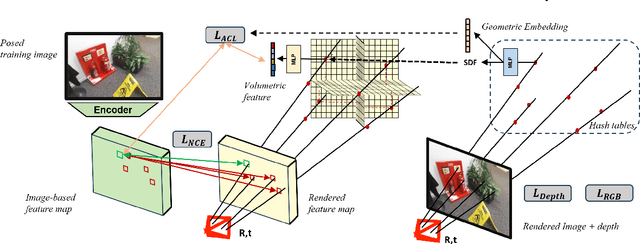
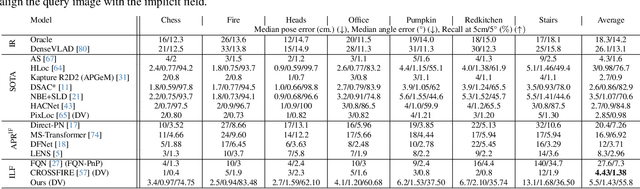
Visual localization techniques rely upon some underlying scene representation to localize against. These representations can be explicit such as 3D SFM map or implicit, such as a neural network that learns to encode the scene. The former requires sparse feature extractors and matchers to build the scene representation. The latter might lack geometric grounding not capturing the 3D structure of the scene well enough. This paper proposes to jointly learn the scene representation along with a 3D dense feature field and a 2D feature extractor whose outputs are embedded in the same metric space. Through a contrastive framework we align this volumetric field with the image-based extractor and regularize the latter with a ranking loss from learned surface information. We learn the underlying geometry of the scene with an implicit field through volumetric rendering and design our feature field to leverage intermediate geometric information encoded in the implicit field. The resulting features are discriminative and robust to viewpoint change while maintaining rich encoded information. Visual localization is then achieved by aligning the image-based features and the rendered volumetric features. We show the effectiveness of our approach on real-world scenes, demonstrating that our approach outperforms prior and concurrent work on leveraging implicit scene representations for localization.
Learning Synthetic to Real Transfer for Localization and Navigational Tasks
Nov 23, 2020
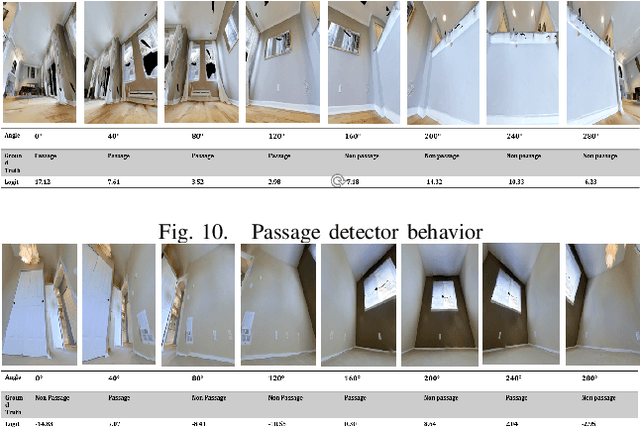

Autonomous navigation consists in an agent being able to navigate without human intervention or supervision, it affects both high level planning and low level control. Navigation is at the crossroad of multiple disciplines, it combines notions of computer vision, robotics and control. This work aimed at creating, in a simulation, a navigation pipeline whose transfer to the real world could be done with as few efforts as possible. Given the limited time and the wide range of problematic to be tackled, absolute navigation performances while important was not the main objective. The emphasis was rather put on studying the sim2real gap which is one the major bottlenecks of modern robotics and autonomous navigation. To design the navigation pipeline four main challenges arise; environment, localization, navigation and planning. The iGibson simulator is picked for its photo-realistic textures and physics engine. A topological approach to tackle space representation was picked over metric approaches because they generalize better to new environments and are less sensitive to change of conditions. The navigation pipeline is decomposed as a localization module, a planning module and a local navigation module. These modules utilize three different networks, an image representation extractor, a passage detector and a local policy. The laters are trained on specifically tailored tasks with some associated datasets created for those specific tasks. Localization is the ability for the agent to localize itself against a specific space representation. It must be reliable, repeatable and robust to a wide variety of transformations. Localization is tackled as an image retrieval task using a deep neural network trained on an auxiliary task as a feature descriptor extractor. The local policy is trained with behavioral cloning from expert trajectories gathered with ROS navigation stack.