 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Hole-Detection in Triangular Meshes Irrespective of the Presence of Singular Vertices
Nov 21, 2023In this work, we present a boundary and hole detection approach that traverses all the boundaries of an edge-manifold triangular mesh, irrespectively of the presence of singular vertices, and subsequently determines and labels all holes of the mesh. The proposed automated hole-detection method is valuable to the computer-aided design (CAD) community as all half-edges within the mesh are utilized and for each half-edge the algorithm guarantees both the existence and the uniqueness of the boundary associated to it. As existing hole-detection approaches assume that singular vertices are absent or may require mesh modification, these methods are ill-equipped to detect boundaries/holes in real-world meshes that contain singular vertices. We demonstrate the method in an underwater autonomous robotic application, exploiting surface reconstruction methods based on point cloud data. In such a scenario the determined holes can be interpreted as information gaps, enabling timely corrective action during the data acquisition. However, the scope of our method is not confined to these two sectors alone; it is versatile enough to be applied on any edge-manifold triangle mesh. An evaluation of the method is performed on both synthetic and real-world data (including a triangle mesh from a point cloud obtained by a multibeam sonar). The source code of our reference implementation is available: https://github.com/Mauhing/hole-detection-on-triangle-mesh.
Removing Adverse Volumetric Effects From Trained Neural Radiance Fields
Nov 17, 2023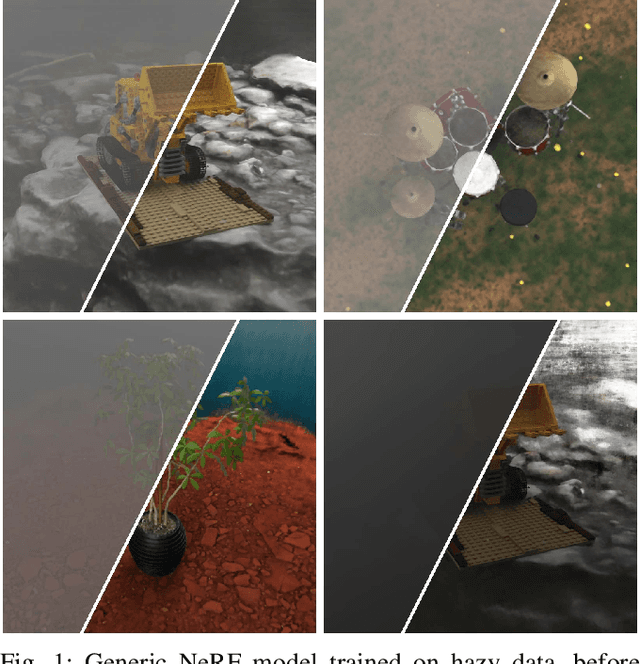


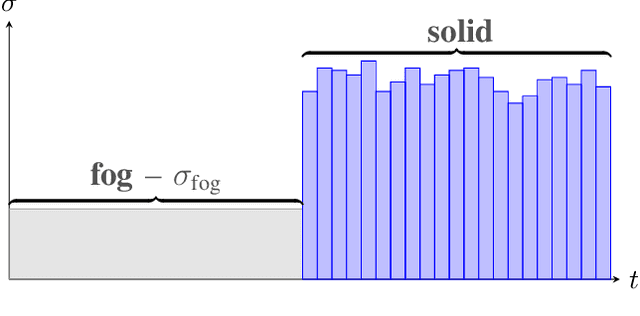
While the use of neural radiance fields (NeRFs) in different challenging settings has been explored, only very recently have there been any contributions that focus on the use of NeRF in foggy environments. We argue that the traditional NeRF models are able to replicate scenes filled with fog and propose a method to remove the fog when synthesizing novel views. By calculating the global contrast of a scene, we can estimate a density threshold that, when applied, removes all visible fog. This makes it possible to use NeRF as a way of rendering clear views of objects of interest located in fog-filled environments. Additionally, to benchmark performance on such scenes, we introduce a new dataset that expands some of the original synthetic NeRF scenes through the addition of fog and natural environments. The code, dataset, and video results can be found on our project page: https://vegardskui.com/fognerf/