 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferential pose optimization in descriptor space -- Combining Geometric and Photometric Methods for Motion Estimation
Feb 15, 2026One of the fundamental problems in computer vision is the two-frame relative pose optimization problem. Primarily, two different kinds of error values are used: photometric error and re-projection error. The selection of error value is usually directly dependent on the selection of feature paradigm, photometric features, or geometric features. It is a trade-off between accuracy, robustness, and the possibility of loop closing. We investigate a third method that combines the strengths of both paradigms into a unified approach. Using densely sampled geometric feature descriptors, we replace the photometric error with a descriptor residual from a dense set of descriptors, thereby enabling the employment of sub-pixel accuracy in differential photometric methods, along with the expressiveness of the geometric feature descriptor. Experiments show that although the proposed strategy is an interesting approach that results in accurate tracking, it ultimately does not outperform pose optimization strategies based on re-projection error despite utilizing more information. We proceed to analyze the underlying reason for this discrepancy and present the hypothesis that the descriptor similarity metric is too slowly varying and does not necessarily correspond strictly to keypoint placement accuracy.
Removing Adverse Volumetric Effects From Trained Neural Radiance Fields
Nov 17, 2023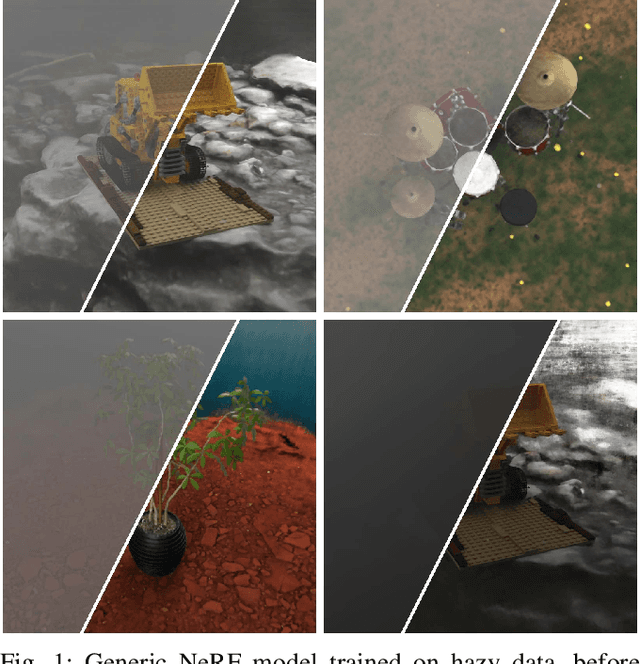


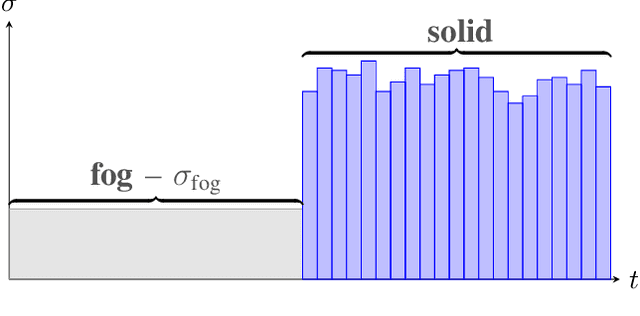
While the use of neural radiance fields (NeRFs) in different challenging settings has been explored, only very recently have there been any contributions that focus on the use of NeRF in foggy environments. We argue that the traditional NeRF models are able to replicate scenes filled with fog and propose a method to remove the fog when synthesizing novel views. By calculating the global contrast of a scene, we can estimate a density threshold that, when applied, removes all visible fog. This makes it possible to use NeRF as a way of rendering clear views of objects of interest located in fog-filled environments. Additionally, to benchmark performance on such scenes, we introduce a new dataset that expands some of the original synthetic NeRF scenes through the addition of fog and natural environments. The code, dataset, and video results can be found on our project page: https://vegardskui.com/fognerf/
RGB-D Mapping and Tracking in a Plenoxel Radiance Field
Jul 07, 2023Building on the success of Neural Radiance Fields (NeRFs), recent years have seen significant advances in the domain of novel view synthesis. These models capture the scene's volumetric radiance field, creating highly convincing dense photorealistic models through the use of simple, differentiable rendering equations. Despite their popularity, these algorithms suffer from severe ambiguities in visual data inherent to the RGB sensor, which means that although images generated with view synthesis can visually appear very believable, the underlying 3D model will often be wrong. This considerably limits the usefulness of these models in practical applications like Robotics and Extended Reality (XR), where an accurate dense 3D reconstruction otherwise would be of significant value. In this technical report, we present the vital differences between view synthesis models and 3D reconstruction models. We also comment on why a depth sensor is essential for modeling accurate geometry in general outward-facing scenes using the current paradigm of novel view synthesis methods. Focusing on the structure-from-motion task, we practically demonstrate this need by extending the Plenoxel radiance field model: Presenting an analytical differential approach for dense mapping and tracking with radiance fields based on RGB-D data without a neural network. Our method achieves state-of-the-art results in both the mapping and tracking tasks while also being faster than competing neural network-based approaches.