 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Integrated Simulator and Dataset that Combines Grasping and Vision for Deep Learning
Apr 17, 2017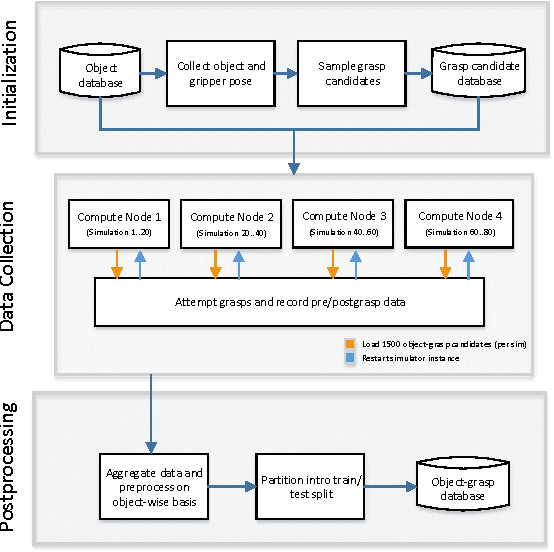
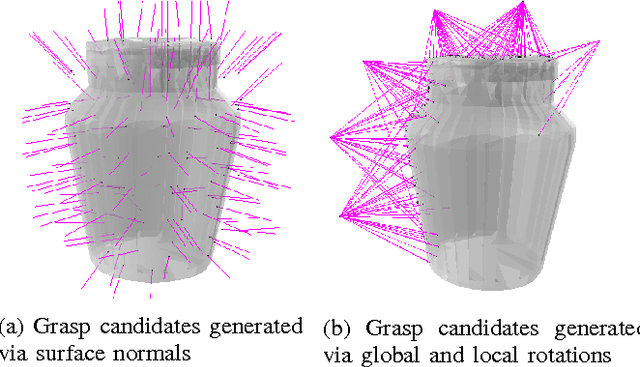
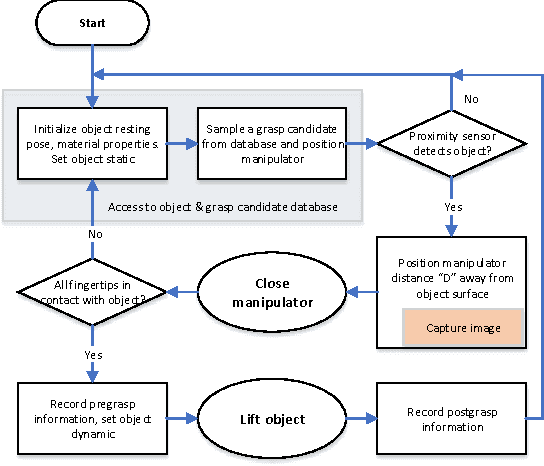
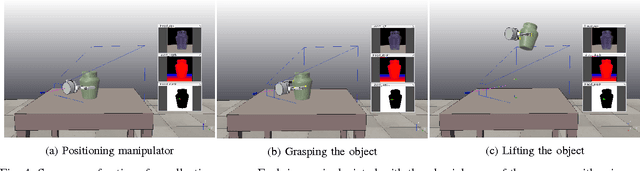
Deep learning is an established framework for learning hierarchical data representations. While compute power is in abundance, one of the main challenges in applying this framework to robotic grasping has been obtaining the amount of data needed to learn these representations, and structuring the data to the task at hand. Among contemporary approaches in the literature, we highlight key properties that have encouraged the use of deep learning techniques, and in this paper, detail our experience in developing a simulator for collecting cylindrical precision grasps of a multi-fingered dexterous robotic hand.
Modeling Grasp Motor Imagery through Deep Conditional Generative Models
Jan 11, 2017
Grasping is a complex process involving knowledge of the object, the surroundings, and of oneself. While humans are able to integrate and process all of the sensory information required for performing this task, equipping machines with this capability is an extremely challenging endeavor. In this paper, we investigate how deep learning techniques can allow us to translate high-level concepts such as motor imagery to the problem of robotic grasp synthesis. We explore a paradigm based on generative models for learning integrated object-action representations, and demonstrate its capacity for capturing and generating multimodal, multi-finger grasp configurations on a simulated grasping dataset.