Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Integrated Simulator and Dataset that Combines Grasping and Vision for Deep Learning
Paper and Code
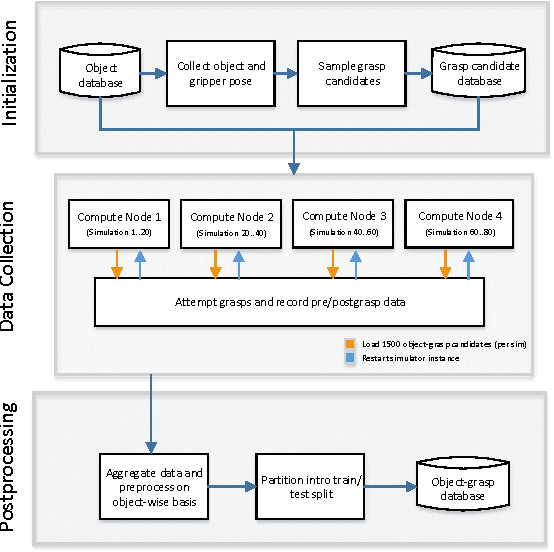
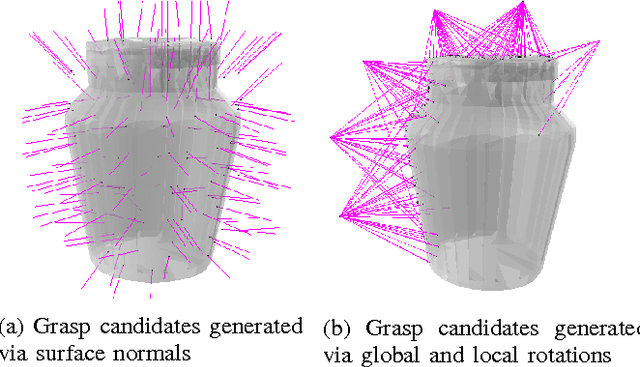
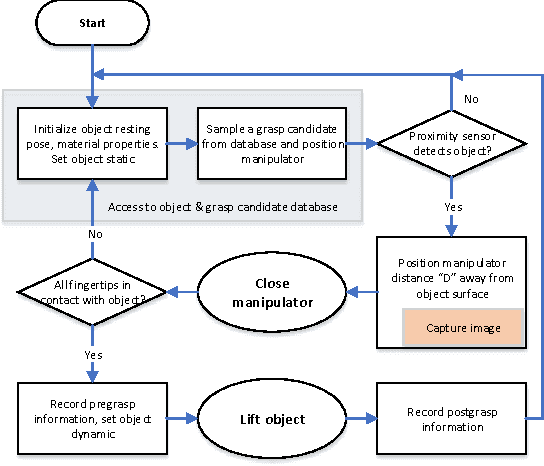
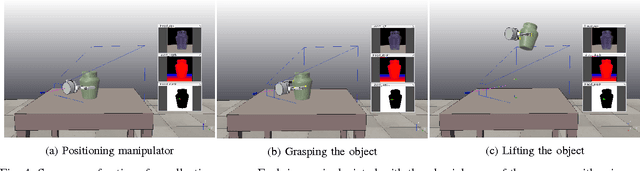
Deep learning is an established framework for learning hierarchical data representations. While compute power is in abundance, one of the main challenges in applying this framework to robotic grasping has been obtaining the amount of data needed to learn these representations, and structuring the data to the task at hand. Among contemporary approaches in the literature, we highlight key properties that have encouraged the use of deep learning techniques, and in this paper, detail our experience in developing a simulator for collecting cylindrical precision grasps of a multi-fingered dexterous robotic hand.
View paper on