 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Control Systems Laboratory Using Human Centered Robotic Actuators
Apr 09, 2019
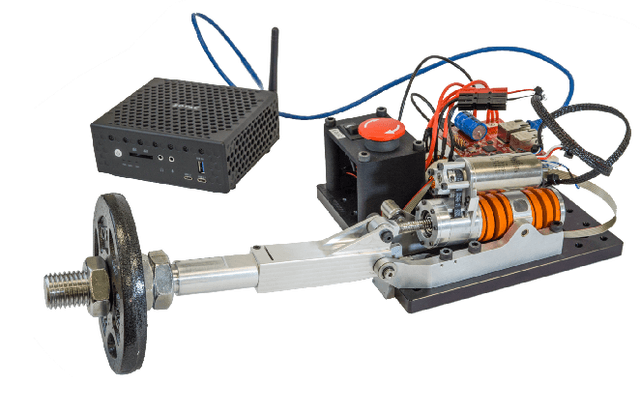


University laboratories deliver unique hands-on experimentation for STEM students but often lack state-of-the-art equipment and provide limited access to their equipment. The University of Texas Cloud Laboratory provides remote access to a cutting-edge series elastic actuators for student experimentation regarding human-centered robotics, dynamical systems, and controls. Through a browser-based interface, students are provided with various learning materials using the remote hardware-in-the-loop system for effective experiment-based education. This paper discusses the methods used to connect remote hardware to mobile browsers, the adaptation of textbook materials regarding system identification and feedback control, data processing to generate clean and useful results for student interpretation, and initial usage of the end-to-end system for individual and group learning.
Web Based Teleoperation of a Humanoid Robot
Jul 19, 2016The Cloud-based Advanced Robotics Laboratory (CARL) integrates a whole body controller and web-based teleoperation to enable any device with a web browser to access and control a humanoid robot. By integrating humanoid robots with the cloud, they are accessible from any Internet-connected device. Increased accessibility is important because few people have access to state-of-the-art humanoid robots limiting their rate of development. CARL's implementation is based on modern software libraries, frameworks, and middleware including Node.js, Socket.IO, ZMQ, ROS, Robot Web Tools, and ControlIt! Feasibility is demonstrated by having inexperienced human operators use a smartphone's web-browser to control Dreamer, a torque-controlled humanoid robot based on series elastic actuators, and make it perform a dual-arm manipulation task. The implementation serves as a proof-of-concept and foundation upon which many advanced humanoid robot technologies can be researched and developed.