 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClassifying Pattern and Feature Properties to Get a $Θ(n)$ Checker and Reformulation for Sliding Time-Series Constraints
Dec 03, 2019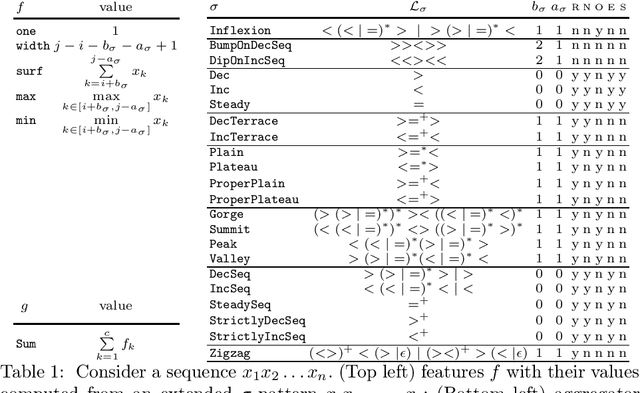
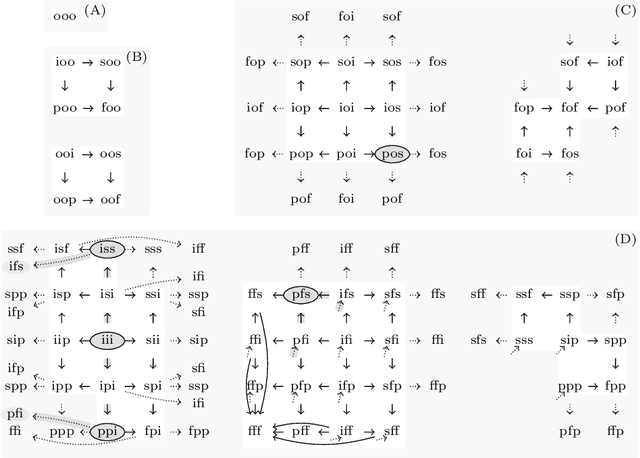
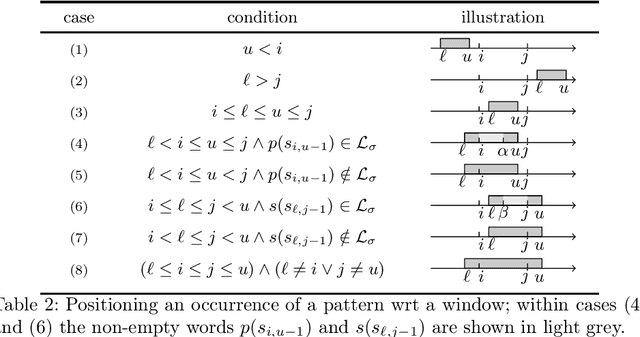
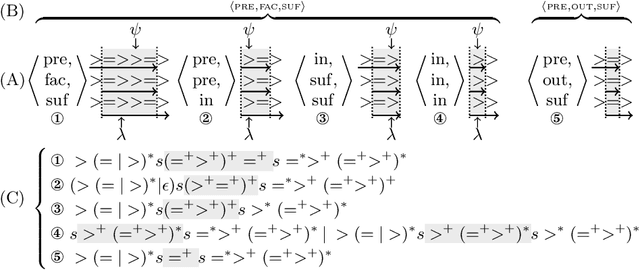
Given, a sequence $\mathcal{X}$ of $n$ variables, a time-series constraint ctr using the Sum aggregator, and a sliding time-series constraint enforcing the constraint ctr on each sliding window of $\mathcal{X}$ of $m$ consecutive variables, we describe a $\Theta(n)$ time complexity checker, as well as a $\Theta(n)$ space complexity reformulation for such sliding constraint.
Time-aware Test Case Execution Scheduling for Cyber-Physical Systems
Feb 12, 2019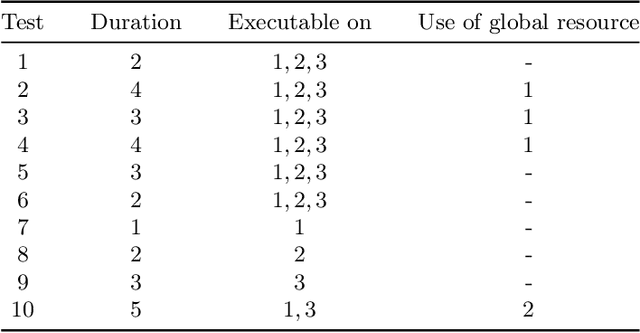
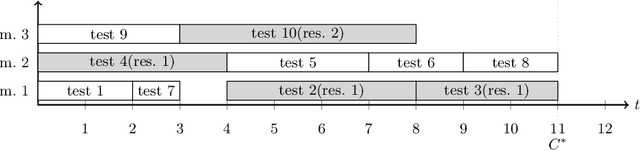
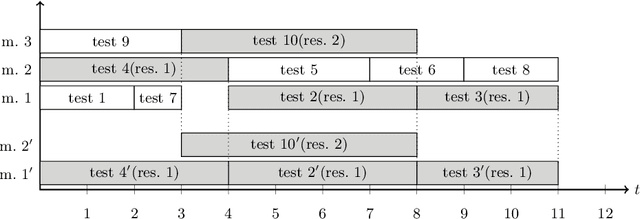
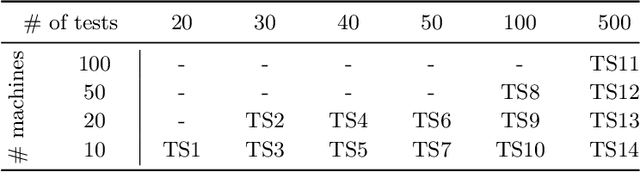
Testing cyber-physical systems involves the execution of test cases on target-machines equipped with the latest release of a software control system. When testing industrial robots, it is common that the target machines need to share some common resources, e.g., costly hardware devices, and so there is a need to schedule test case execution on the target machines, accounting for these shared resources. With a large number of such tests executed on a regular basis, this scheduling becomes difficult to manage manually. In fact, with manual test execution planning and scheduling, some robots may remain unoccupied for long periods of time and some test cases may not be executed. This paper introduces TC-Sched, a time-aware method for automated test case execution scheduling. TC-Sched uses Constraint Programming to schedule tests to run on multiple machines constrained by the tests' access to shared resources, such as measurement or networking devices. The CP model is written in SICStus Prolog and uses the Cumulatives global constraint. Given a set of test cases, a set of machines, and a set of shared resources, TC-Sched produces an execution schedule where each test is executed once with minimal time between when a source code change is committed and the test results are reported to the developer. Experiments reveal that TC-Sched can schedule 500 test cases over 100 machines in less than 4 minutes for 99.5% of the instances. In addition, TC-Sched largely outperforms simpler methods based on a greedy algorithm and is suitable for deployment on industrial robot testing.
* Published in the 23rd International Conference on Principles and Practice of Constraint Programming (CP 2017)
Global Constraint Catalog, Volume II, Time-Series Constraints
Sep 18, 2018
First this report presents a restricted set of finite transducers used to synthesise structural time-series constraints described by means of a multi-layered function composition scheme. Second it provides the corresponding synthesised catalogue of structural time-series constraints where each constraint is explicitly described in terms of automata with registers.