 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShapeShifter: 3D Variations Using Multiscale and Sparse Point-Voxel Diffusion
Feb 04, 2025



This paper proposes ShapeShifter, a new 3D generative model that learns to synthesize shape variations based on a single reference model. While generative methods for 3D objects have recently attracted much attention, current techniques often lack geometric details and/or require long training times and large resources. Our approach remedies these issues by combining sparse voxel grids and point, normal, and color sampling within a multiscale neural architecture that can be trained efficiently and in parallel. We show that our resulting variations better capture the fine details of their original input and can handle more general types of surfaces than previous SDF-based methods. Moreover, we offer interactive generation of 3D shape variants, allowing more human control in the design loop if needed.
PoNQ: a Neural QEM-based Mesh Representation
Mar 19, 2024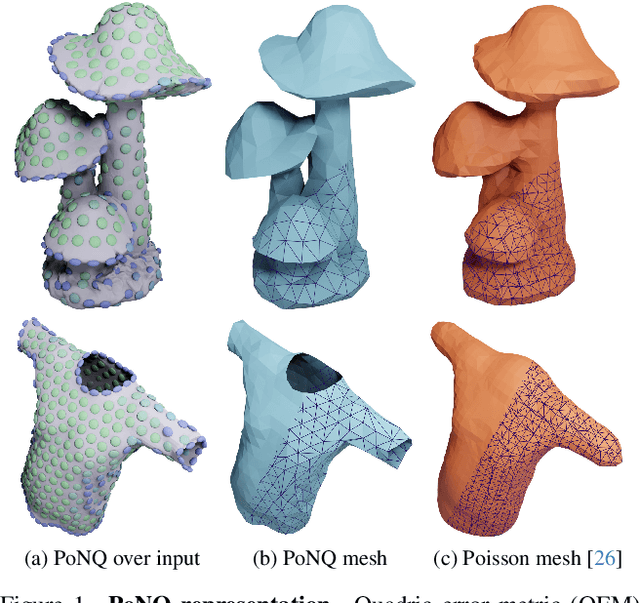



Although polygon meshes have been a standard representation in geometry processing, their irregular and combinatorial nature hinders their suitability for learning-based applications. In this work, we introduce a novel learnable mesh representation through a set of local 3D sample Points and their associated Normals and Quadric error metrics (QEM) w.r.t. the underlying shape, which we denote PoNQ. A global mesh is directly derived from PoNQ by efficiently leveraging the knowledge of the local quadric errors. Besides marking the first use of QEM within a neural shape representation, our contribution guarantees both topological and geometrical properties by ensuring that a PoNQ mesh does not self-intersect and is always the boundary of a volume. Notably, our representation does not rely on a regular grid, is supervised directly by the target surface alone, and also handles open surfaces with boundaries and/or sharp features. We demonstrate the efficacy of PoNQ through a learning-based mesh prediction from SDF grids and show that our method surpasses recent state-of-the-art techniques in terms of both surface and edge-based metrics.
VoroMesh: Learning Watertight Surface Meshes with Voronoi Diagrams
Aug 28, 2023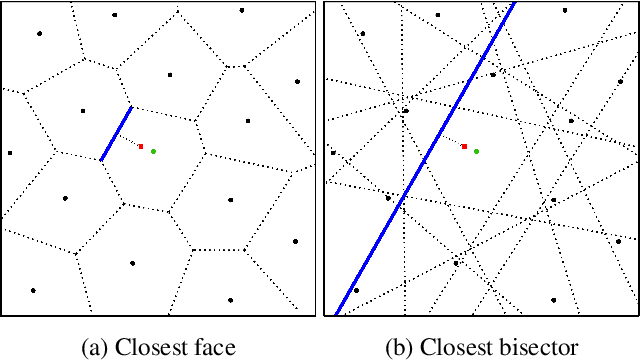

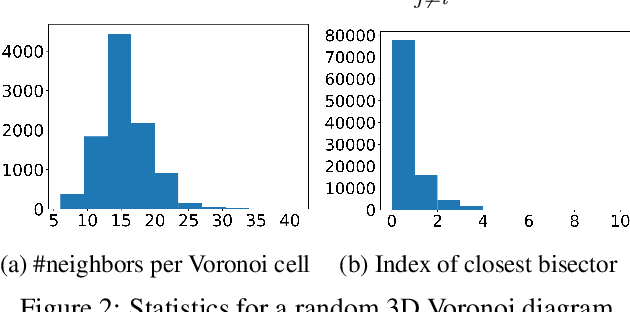

In stark contrast to the case of images, finding a concise, learnable discrete representation of 3D surfaces remains a challenge. In particular, while polygon meshes are arguably the most common surface representation used in geometry processing, their irregular and combinatorial structure often make them unsuitable for learning-based applications. In this work, we present VoroMesh, a novel and differentiable Voronoi-based representation of watertight 3D shape surfaces. From a set of 3D points (called generators) and their associated occupancy, we define our boundary representation through the Voronoi diagram of the generators as the subset of Voronoi faces whose two associated (equidistant) generators are of opposite occupancy: the resulting polygon mesh forms a watertight approximation of the target shape's boundary. To learn the position of the generators, we propose a novel loss function, dubbed VoroLoss, that minimizes the distance from ground truth surface samples to the closest faces of the Voronoi diagram which does not require an explicit construction of the entire Voronoi diagram. A direct optimization of the Voroloss to obtain generators on the Thingi32 dataset demonstrates the geometric efficiency of our representation compared to axiomatic meshing algorithms and recent learning-based mesh representations. We further use VoroMesh in a learning-based mesh prediction task from input SDF grids on the ABC dataset, and show comparable performance to state-of-the-art methods while guaranteeing closed output surfaces free of self-intersections.
Parallel Transport Unfolding: A Connection-based Manifold Learning Approach
Nov 02, 2018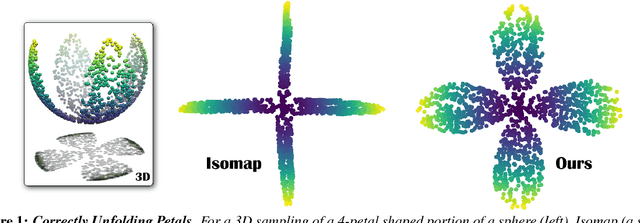
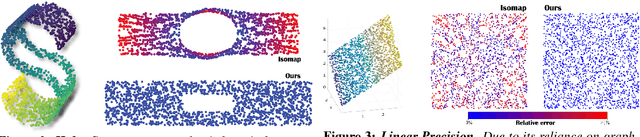

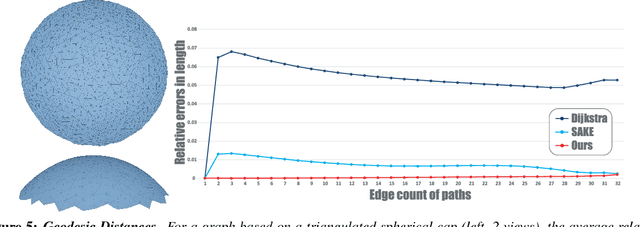
Manifold learning offers nonlinear dimensionality reduction of high-dimensional datasets. In this paper, we bring geometry processing to bear on manifold learning by introducing a new approach based on metric connection for generating a quasi-isometric, low-dimensional mapping from a sparse and irregular sampling of an arbitrary manifold embedded in a high-dimensional space. Geodesic distances of discrete paths over the input pointset are evaluated through "parallel transport unfolding" (PTU) to offer robustness to poor sampling and arbitrary topology. Our new geometric procedure exhibits the same strong resilience to noise as one of the staples of manifold learning, the Isomap algorithm, as it also exploits all pairwise geodesic distances to compute a low-dimensional embedding. While Isomap is limited to geodesically-convex sampled domains, parallel transport unfolding does not suffer from this crippling limitation, resulting in an improved robustness to irregularity and voids in the sampling. Moreover, it involves only simple linear algebra, significantly improves the accuracy of all pairwise geodesic distance approximations, and has the same computational complexity as Isomap. Finally, we show that our connection-based distance estimation can be used for faster variants of Isomap such as L-Isomap.