 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTorque-based Deep Reinforcement Learning for Task-and-Robot Agnostic Learning on Bipedal Robots Using Sim-to-Real Transfer
Apr 19, 2023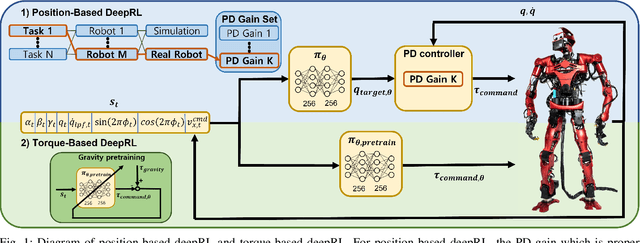
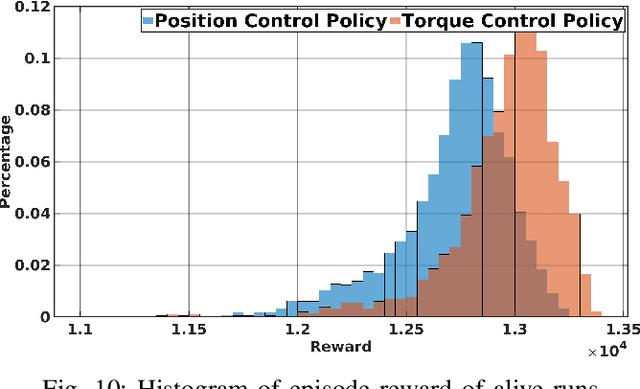
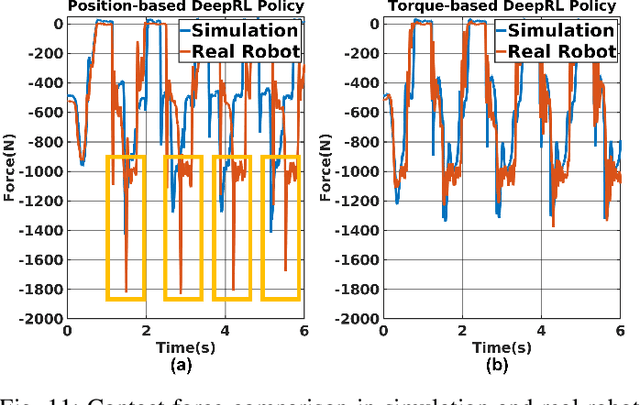

In this paper, we review the question of which action space is best suited for controlling a real biped robot in combination with Sim2Real training. Position control has been popular as it has been shown to be more sample efficient and intuitive to combine with other planning algorithms. However, for position control gain tuning is required to achieve the best possible policy performance. We show that instead, using a torque-based action space enables task-and-robot agnostic learning with less parameter tuning and mitigates the sim-to-reality gap by taking advantage of torque control's inherent compliance. Also, we accelerate the torque-based-policy training process by pre-training the policy to remain upright by compensating for gravity. The paper showcases the first successful sim-to-real transfer of a torque-based deep reinforcement learning policy on a real human-sized biped robot. The video is available at https://youtu.be/CR6pTS39VRE.
Adding Visibility to Visibility Graphs: Weighting Visibility Analysis with Attenuation Coefficients
Jul 28, 2021



Evaluating the built environment based on visibility has been long used as a tool for human-centric design. The origins of isovists and visibility graphs are within interior spaces, while more recently, these evaluation techniques have been applied in the urban context. One of the key differentiators of an outside environment is the weather, which has largely been ignored in the design computation and space-syntax research areas. While a visibility graph is a straightforward metric for determining connectivity between regions of space through a line of sight calculation, this approach largely ignores the actual visibility of one point to another. This paper introduces a new method for weighting a visibility graph based on weather conditions (i.e. rain, fog, snow). These new factors are integrated into visibility graphs and applied to sample environments to demonstrate the variance between assuming a straight line of sight and reduced visibility.
Style Similarity as Feedback for Product Design
May 25, 2021
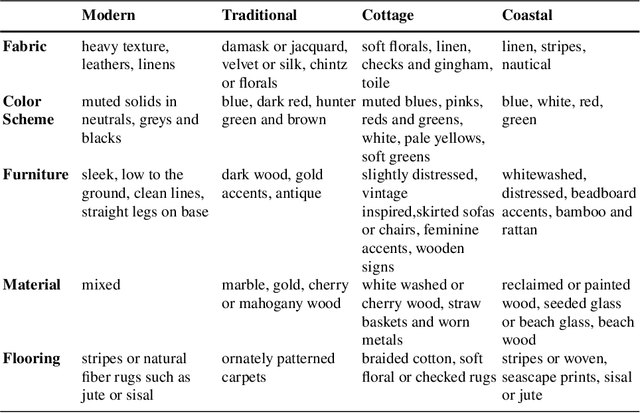


Matching and recommending products is beneficial for both customers and companies. With the rapid increase in home goods e-commerce, there is an increasing demand for quantitative methods for providing such recommendations for millions of products. This approach is facilitated largely by online stores such as Amazon and Wayfair, in which the goal is to maximize overall sales. Instead of focusing on overall sales, we take a product design perspective, by employing big-data analysis for determining the design qualities of a highly recommended product. Specifically, we focus on the visual style compatibility of such products. We build off previous work which implemented a style-based similarity metric for thousands of furniture products. Using analysis and visualization, we extract attributes of furniture products that are highly compatible style-wise. We propose a designer in-the-loop workflow that mirrors methods of displaying similar products to consumers browsing e-commerce websites. Our findings are useful when designing new products, since they provide insight regarding what furniture will be strongly compatible across multiple styles, and hence, more likely to be recommended.
* 15 pages, 9 figures, interdisciplinary book chapter on using computer vision and style similarity for industrial design