 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeltaLLM: Compress LLMs with Low-Rank Deltas between Shared Weights
Jan 30, 2025We introduce DeltaLLM, a new post-training compression technique to reduce the memory footprint of LLMs. We propose an alternative way of structuring LLMs with weight sharing between layers in subsequent Transformer blocks, along with additional low-rank difference matrices between them. For training, we adopt the progressing module replacement method and show that the lightweight training of the low-rank modules with approximately 30M-40M tokens is sufficient to achieve performance on par with LLMs of comparable sizes trained from scratch. We release the resultant models, DeltaLLAMA and DeltaPHI, with a 12% parameter reduction, retaining 90% of the performance of the base Llama and Phi models on common knowledge and reasoning benchmarks. Our method also outperforms compression techniques JointDrop, LaCo, ShortGPT and SliceGPT with the same number of parameters removed. For example, DeltaPhi 2.9B with a 24% reduction achieves similar average zero-shot accuracies as recovery fine-tuned SlicedPhi 3.3B with a 12% reduction, despite being approximately 400M parameters smaller with no fine-tuning applied. This work provides new insights into LLM architecture design and compression methods when storage space is critical.
Matching Multiple Perspectives for Efficient Representation Learning
Aug 16, 2022

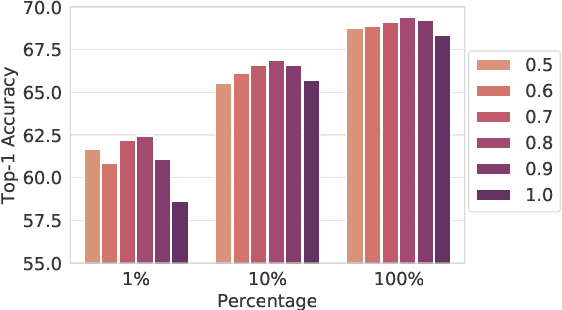
Representation learning approaches typically rely on images of objects captured from a single perspective that are transformed using affine transformations. Additionally, self-supervised learning, a successful paradigm of representation learning, relies on instance discrimination and self-augmentations which cannot always bridge the gap between observations of the same object viewed from a different perspective. Viewing an object from multiple perspectives aids holistic understanding of an object which is particularly important in situations where data annotations are limited. In this paper, we present an approach that combines self-supervised learning with a multi-perspective matching technique and demonstrate its effectiveness on learning higher quality representations on data captured by a robotic vacuum with an embedded camera. We show that the availability of multiple views of the same object combined with a variety of self-supervised pretraining algorithms can lead to improved object classification performance without extra labels.