 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Weak Perspective for Monocular 3D Human Pose Estimation
Sep 14, 2020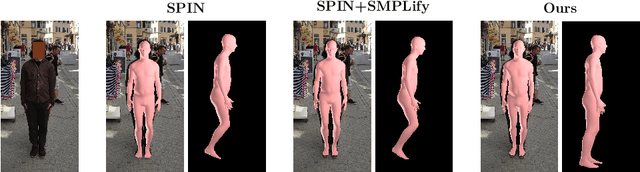
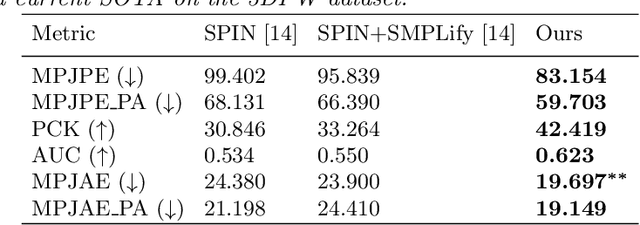
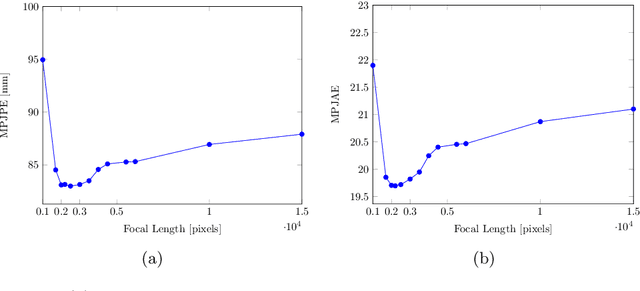
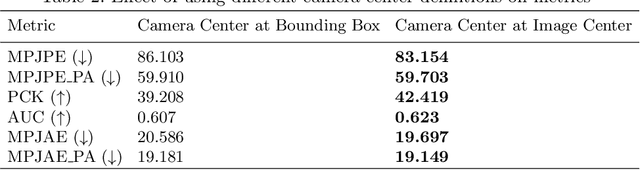
We consider the task of 3D joints location and orientation prediction from a monocular video with the skinned multi-person linear (SMPL) model. We first infer 2D joints locations with an off-the-shelf pose estimation algorithm. We use the SPIN algorithm and estimate initial predictions of body pose, shape and camera parameters from a deep regression neural network. We then adhere to the SMPLify algorithm which receives those initial parameters, and optimizes them so that inferred 3D joints from the SMPL model would fit the 2D joints locations. This algorithm involves a projection step of 3D joints to the 2D image plane. The conventional approach is to follow weak perspective assumptions which use ad-hoc focal length. Through experimentation on the 3D Poses in the Wild (3DPW) dataset, we show that using full perspective projection, with the correct camera center and an approximated focal length, provides favorable results. Our algorithm has resulted in a winning entry for the 3DPW Challenge, reaching first place in joints orientation accuracy.
Learn Stereo, Infer Mono: Siamese Networks for Self-Supervised, Monocular, Depth Estimation
May 01, 2019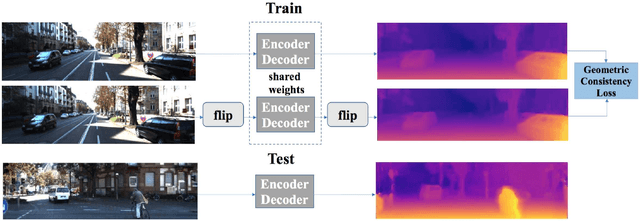
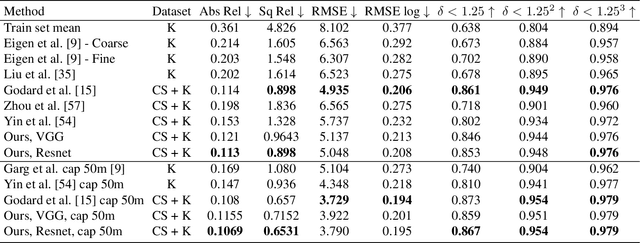
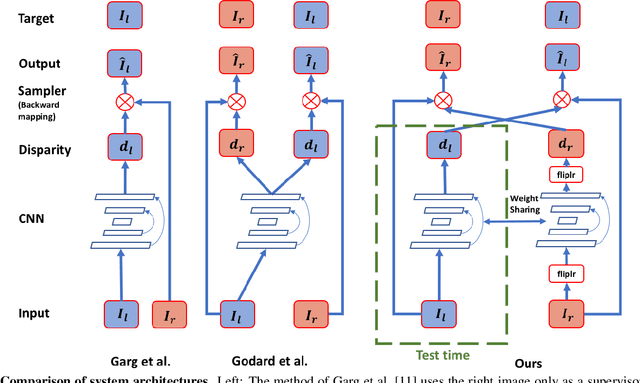
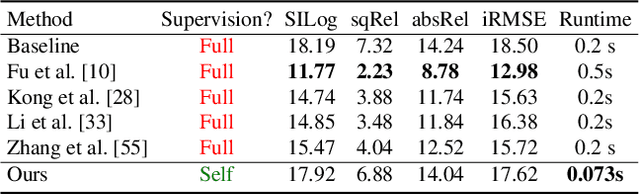
The field of self-supervised monocular depth estimation has seen huge advancements in recent years. Most methods assume stereo data is available during training but usually under-utilize it and only treat it as a reference signal. We propose a novel self-supervised approach which uses both left and right images equally during training, but can still be used with a single input image at test time, for monocular depth estimation. Our Siamese network architecture consists of two, twin networks, each learns to predict a disparity map from a single image. At test time, however, only one of these networks is used in order to infer depth. We show state-of-the-art results on the standard KITTI Eigen split benchmark as well as being the highest scoring self-supervised method on the new KITTI single view benchmark. To demonstrate the ability of our method to generalize to new data sets, we further provide results on the Make3D benchmark, which was not used during training.