 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Orchestration for Large-Scale Inference on Heterogeneous Accelerator Systems Balancing Cost, Performance, and Resilience
Mar 27, 2025The surge in generative AI workloads has created a need for scalable inference systems that can flexibly harness both GPUs and specialized accelerators while containing operational costs. This paper proposes a hardware-agnostic control loop that adaptively allocates requests across heterogeneous accelerators based on real-time cost and capacity signals. The approach sustains low latency and high throughput by dynamically shifting between cost-optimized and capacity-optimized modes, ensuring the most efficient use of expensive compute resources under fluctuating availability. Evaluated using the Stable Diffusion model, the framework consistently meets latency targets, automatically redirects traffic during capacity shortfalls, and capitalizes on lower-cost accelerators when possible. These results highlight how a feedback-driven deployment strategy, spanning the entire software and hardware stack, can help organizations efficiently scale generative AI workloads while maintaining resilience in the face of limited accelerator capacity.
Beyond Weak Perspective for Monocular 3D Human Pose Estimation
Sep 14, 2020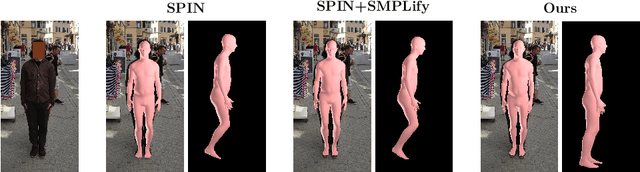
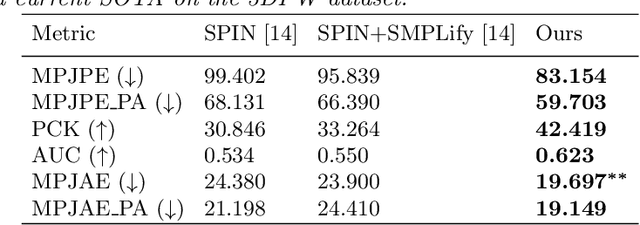
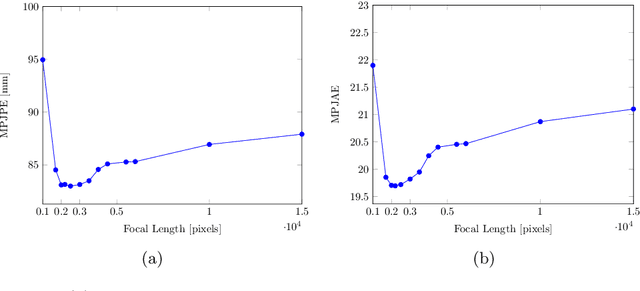
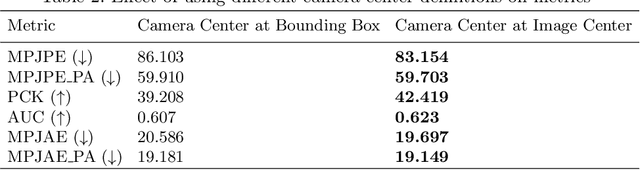
We consider the task of 3D joints location and orientation prediction from a monocular video with the skinned multi-person linear (SMPL) model. We first infer 2D joints locations with an off-the-shelf pose estimation algorithm. We use the SPIN algorithm and estimate initial predictions of body pose, shape and camera parameters from a deep regression neural network. We then adhere to the SMPLify algorithm which receives those initial parameters, and optimizes them so that inferred 3D joints from the SMPL model would fit the 2D joints locations. This algorithm involves a projection step of 3D joints to the 2D image plane. The conventional approach is to follow weak perspective assumptions which use ad-hoc focal length. Through experimentation on the 3D Poses in the Wild (3DPW) dataset, we show that using full perspective projection, with the correct camera center and an approximated focal length, provides favorable results. Our algorithm has resulted in a winning entry for the 3DPW Challenge, reaching first place in joints orientation accuracy.