 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Self-Explanation of Behavior for Interactive Reinforcement Learning Agents
Oct 20, 2018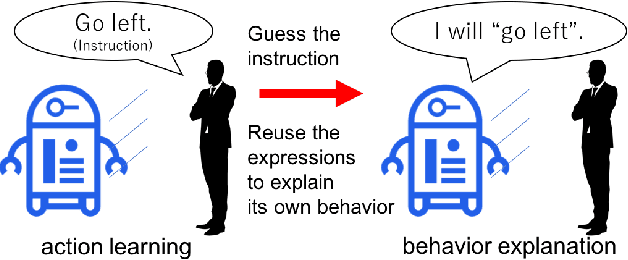
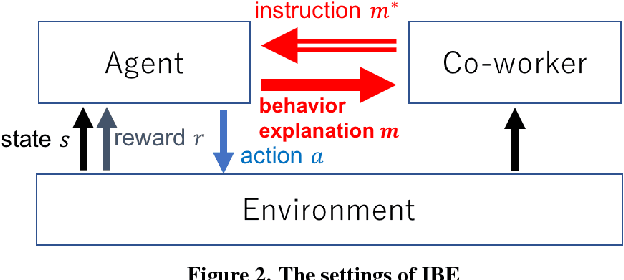

In cooperation, the workers must know how co-workers behave. However, an agent's policy, which is embedded in a statistical machine learning model, is hard to understand, and requires much time and knowledge to comprehend. Therefore, it is difficult for people to predict the behavior of machine learning robots, which makes Human Robot Cooperation challenging. In this paper, we propose Instruction-based Behavior Explanation (IBE), a method to explain an autonomous agent's future behavior. In IBE, an agent can autonomously acquire the expressions to explain its own behavior by reusing the instructions given by a human expert to accelerate the learning of the agent's policy. IBE also enables a developmental agent, whose policy may change during the cooperation, to explain its own behavior with sufficient time granularity.
Bayesian Inference of Self-intention Attributed by Observer
Oct 12, 2018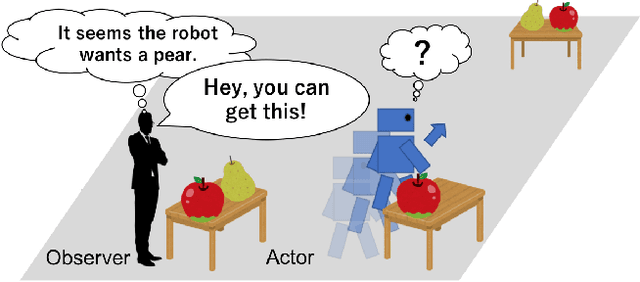
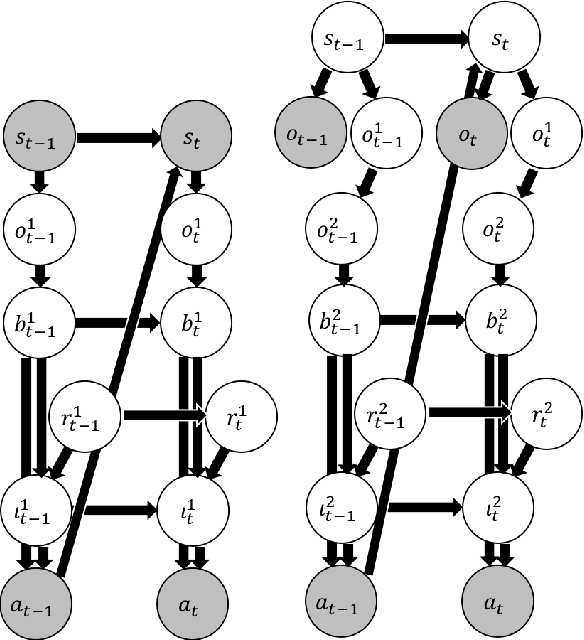
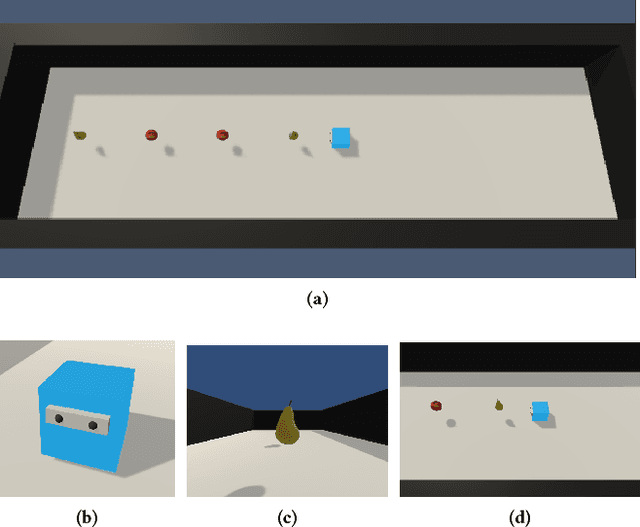
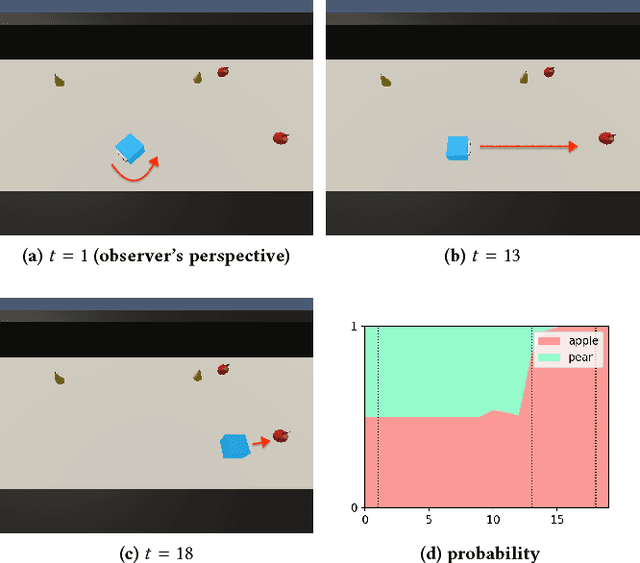
Most of agents that learn policy for tasks with reinforcement learning (RL) lack the ability to communicate with people, which makes human-agent collaboration challenging. We believe that, in order for RL agents to comprehend utterances from human colleagues, RL agents must infer the mental states that people attribute to them because people sometimes infer an interlocutor's mental states and communicate on the basis of this mental inference. This paper proposes PublicSelf model, which is a model of a person who infers how the person's own behavior appears to their colleagues. We implemented the PublicSelf model for an RL agent in a simulated environment and examined the inference of the model by comparing it with people's judgment. The results showed that the agent's intention that people attributed to the agent's movement was correctly inferred by the model in scenes where people could find certain intentionality from the agent's behavior.