 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Power Control for Over-the-Air Computation with Phase Noise
Jun 17, 2026Estimation of uplink channels is required for coherent over-the-air computation (OAC). When channel estimation is done using calibrated reciprocity, the estimates are only available locally to the devices. This poses a challenge for precoding and decoding, which cannot be coordinated centrally. To this end we use truncated channel inversion (TCI) and propose an approximate closed form solution and an exact numerical solver to optimize the TCI parameters. Importantly, we prove that the proposed TCI scheme is independent of the number of receiver antennas in terms of mean-square-error (MSE). Furthermore, our analysis reveals a clear connection between the MSE and expected aggregate phase error across devices which gives insight to the scalability of OAC. Finally, simulations with comparisons to reference methods from prior work with globally available error-free channel estimates show that proposed is close, even outperforming these references in MSE under some conditions.
A Unified Framework for Unbiased Non-Coherent Over-the-Air Computation
May 27, 2026Over-the-Air Computation (OAC) enables efficient data aggregation in large-scale distributed systems by exploiting the superposition property of wireless multiple-access channels. In contrast to most existing studies on OAC assuming exact channel state information, we consider non-coherent OAC (NC-OAC) where the channel phase is unknown at the transmitters. A three-step framework for NC-OAC with a mapping between source data and codewords is proposed: 1) Devices encode their data to non-negative codewords; 2) Devices transmit a sequence of symbols with amplitude proportional to their codewords, such that the receiver can estimate the codeword sum. Estimation of the codeword sum is studied under two scenarios of global channel amplitude knowledge: statistical or instantaneous; 3) The estimated codeword sum is decoded to the desired source data sum at the receiver. With the proposed framework, we first study prior work on NC-OAC and map these to the framework. Next, we define and compare the two most commonly (often implicitly) used mappings for NC-OAC: the Affine and the Augmented Affine mappings. Under the constraint of unbiased estimation, we show that with uniformly distributed data and standard channel assumptions, the Augmented Affine mapping exhibits an order of magnitude lower estimation variance than the Affine mapping with both statistical and instantaneous channel knowledge. This result is validated by extensive simulations. Finally, we propose and analyze a new mapping, which demonstrates superior performance over the previous two affine mappings.
Hybrid Channel Estimation with Quantized Phase Feedback for Over-the-Air Computation
Jan 22, 2026To reduce the signaling overhead of over-the-air computation, a hybrid channel estimation scheme is proposed, where reciprocity-based and feedback-based channel estimation are combined. In particular, the impact of quantized phase-feedback is studied while the amplitude is assumed estimated exactly. The scheme enables selecting the estimation precision of amplitude and phase separately, depending on the importance of each. Two variants of the scheme are proposed: As shown through simulations and theory, the second variant with reciprocity-based estimation of the channel phase, and optimal quantization of phase feedback, can outperform the first variant estimating the phase by feedback only.
Infrastructure-based Autonomous Mobile Robots for Internal Logistics -- Challenges and Future Perspectives
Dec 17, 2025



The adoption of Autonomous Mobile Robots (AMRs) for internal logistics is accelerating, with most solutions emphasizing decentralized, onboard intelligence. While AMRs in indoor environments like factories can be supported by infrastructure, involving external sensors and computational resources, such systems remain underexplored in the literature. This paper presents a comprehensive overview of infrastructure-based AMR systems, outlining key opportunities and challenges. To support this, we introduce a reference architecture combining infrastructure-based sensing, on-premise cloud computing, and onboard autonomy. Based on the architecture, we review core technologies for localization, perception, and planning. We demonstrate the approach in a real-world deployment in a heavy-vehicle manufacturing environment and summarize findings from a user experience (UX) evaluation. Our aim is to provide a holistic foundation for future development of scalable, robust, and human-compatible AMR systems in complex industrial environments.
Over-the-Air Federated Learning with Phase Noise: Analysis and Countermeasures
Jan 16, 2024Wirelessly connected devices can collaborately train a machine learning model using federated learning, where the aggregation of model updates occurs using over-the-air computation. Carrier frequency offset caused by imprecise clocks in devices will cause the phase of the over-the-air channel to drift randomly, such that late symbols in a coherence block are transmitted with lower quality than early symbols. To mitigate the effect of degrading symbol quality, we propose a scheme where one of the permutations Roll, Flip and Sort are applied on gradients before transmission. Through simulations we show that the permutations can both improve and degrade learning performance. Furthermore, we derive the expectation and variance of the gradient estimate, which is shown to grow exponentially with the number of symbols in a coherence block.
Decentralized Learning over Wireless Networks: The Effect of Broadcast with Random Access
May 12, 2023In this work, we focus on the communication aspect of decentralized learning, which involves multiple agents training a shared machine learning model using decentralized stochastic gradient descent (D-SGD) over distributed data. In particular, we investigate the impact of broadcast transmission and probabilistic random access policy on the convergence performance of D-SGD, considering the broadcast nature of wireless channels and the link dynamics in the communication topology. Our results demonstrate that optimizing the access probability to maximize the expected number of successful links is a highly effective strategy for accelerating the system convergence.
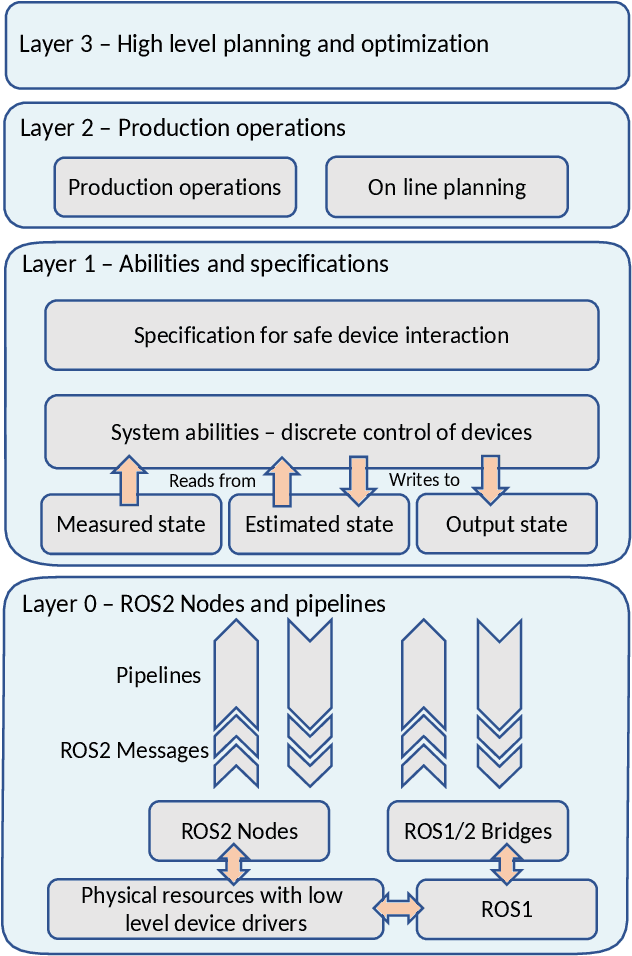
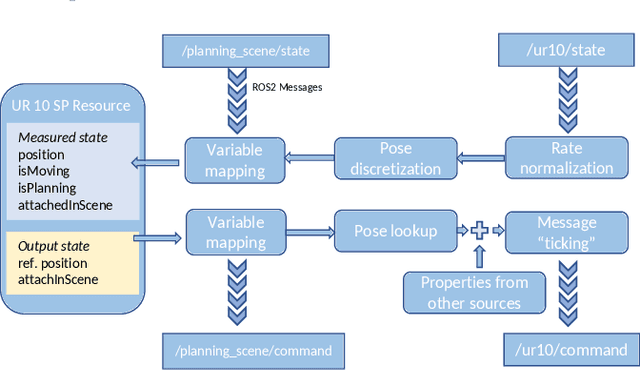
A ROS2 based communication architecture for control in collaborative and intelligent automation systems
May 23, 2019



Collaborative robots are becoming part of intelligent automation systems in modern industry. Development and control of such systems differs from traditional automation methods and consequently leads to new challenges. Thankfully, Robot Operating System (ROS) provides a communication platform and a vast variety of tools and utilities that can aid that development. However, it is hard to use ROS in large-scale automation systems due to communication issues in a distributed setup, hence the development of ROS2. In this paper, a ROS2 based communication architecture is presented together with an industrial use-case of a collaborative and intelligent automation system.
Sequence Planner - Automated Planning and Control for ROS2-based Collaborative and Intelligent Automation Systems
Mar 14, 2019

Systems based on the Robot Operating System (ROS) are easy to extend with new on-line algorithms and devices. However, there is relatively little support for coordinating a large number of heterogeneous sub-systems. In this paper we propose an architecture to model and control collaborative and intelligent automation systems in a hierarchical fashion.