Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSequence Planner - Automated Planning and Control for ROS2-based Collaborative and Intelligent Automation Systems
Paper and Code
Mar 14, 2019
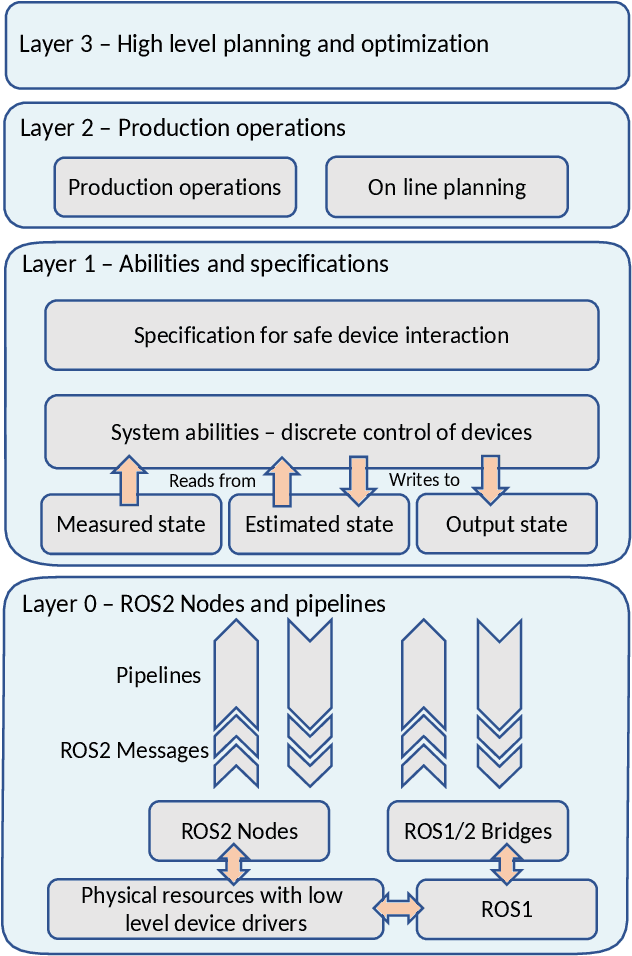

Systems based on the Robot Operating System (ROS) are easy to extend with new on-line algorithms and devices. However, there is relatively little support for coordinating a large number of heterogeneous sub-systems. In this paper we propose an architecture to model and control collaborative and intelligent automation systems in a hierarchical fashion.
* Submitted to IROS 2019. \c{opyright} 2019 IEEE. Personal use of this
material is permitted. Permission from IEEE must be obtained for all other
uses
View paper on