 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Behavior Trees in Risk Assessment
Jun 11, 2025Cyber-physical production systems increasingly involve collaborative robotic missions, requiring more demand for robust and safe missions. Industries rely on risk assessments to identify potential failures and implement measures to mitigate their risks. Although it is recommended to conduct risk assessments early in the design of robotic missions, the state of practice in the industry is different. Safety experts often struggle to completely understand robotics missions at the early design stages of projects and to ensure that the output of risk assessments is adequately considered during implementation. This paper presents a design science study that conceived a model-based approach for early risk assessment in a development-centric way. Our approach supports risk assessment activities by using the behavior-tree model. We evaluated the approach together with five practitioners from four companies. Our findings highlight the potential of the behavior-tree model in supporting early identification, visualisation, and bridging the gap between code implementation and risk assessments' outputs. This approach is the first attempt to use the behavior-tree model to support risk assessment; thus, the findings highlight the need for further development.
Sequence Planner - Automated Planning and Control for ROS2-based Collaborative and Intelligent Automation Systems
Mar 14, 2019
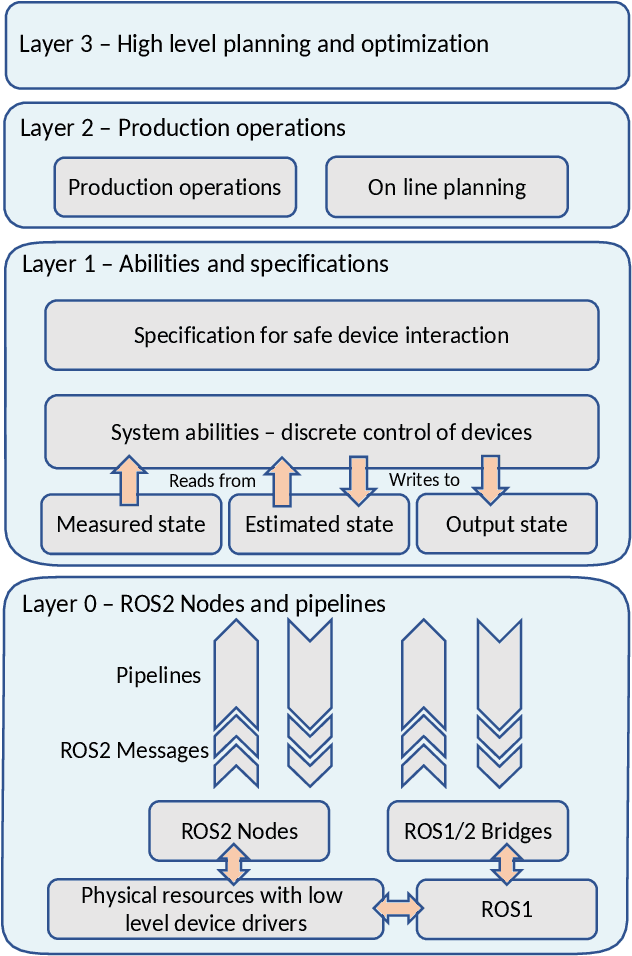
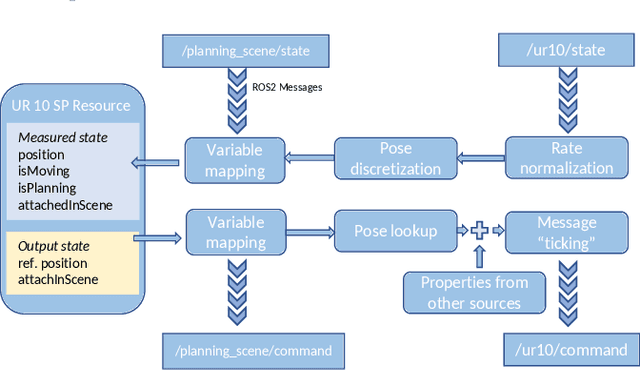

Systems based on the Robot Operating System (ROS) are easy to extend with new on-line algorithms and devices. However, there is relatively little support for coordinating a large number of heterogeneous sub-systems. In this paper we propose an architecture to model and control collaborative and intelligent automation systems in a hierarchical fashion.