 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlending of Learning-based Tracking and Object Detection for Monocular Camera-based Target Following
Aug 21, 2020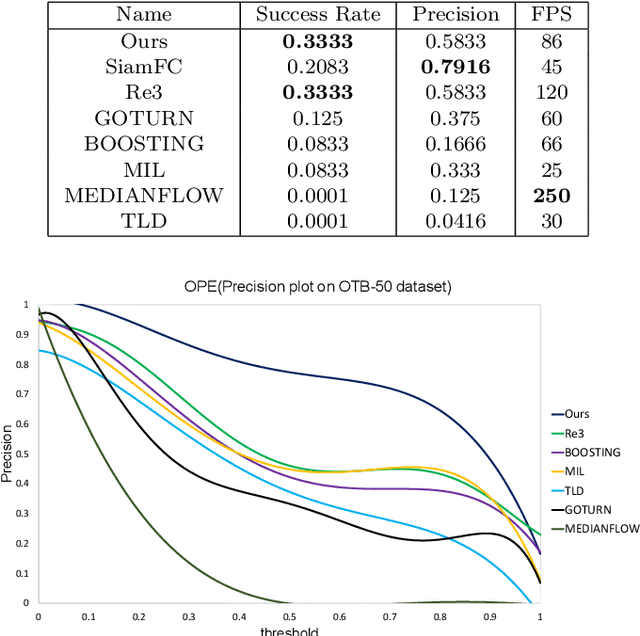
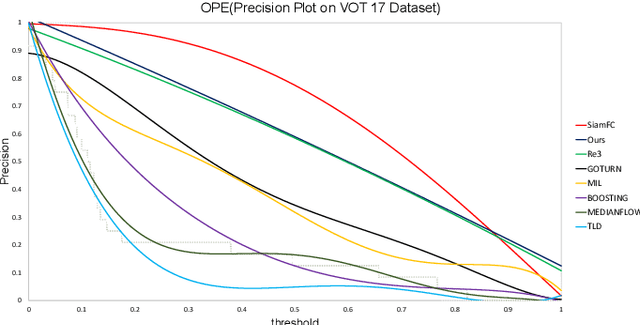
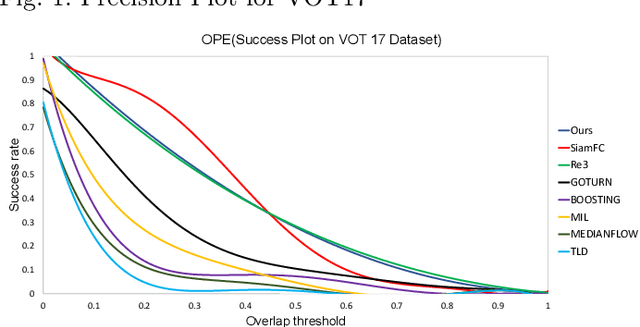

Deep learning has recently started being applied to visual tracking of generic objects in video streams. For the purposes of robotics applications, it is very important for a target tracker to recover its track if it is lost due to heavy or prolonged occlusions or motion blur of the target. We present a real-time approach which fuses a generic target tracker and object detection module with a target re-identification module. Our work focuses on improving the performance of Convolutional Recurrent Neural Network-based object trackers in cases where the object of interest belongs to the category of \emph{familiar} objects. Our proposed approach is sufficiently lightweight to track objects at 85-90 FPS while attaining competitive results on challenging benchmarks.
On the Covariance of ICP-based Scan-matching Techniques
Mar 16, 2016



This paper considers the problem of estimating the covariance of roto-translations computed by the Iterative Closest Point (ICP) algorithm. The problem is relevant for localization of mobile robots and vehicles equipped with depth-sensing cameras (e.g., Kinect) or Lidar (e.g., Velodyne). The closed-form formulas for covariance proposed in previous literature generally build upon the fact that the solution to ICP is obtained by minimizing a linear least-squares problem. In this paper, we show this approach needs caution because the rematching step of the algorithm is not explicitly accounted for, and applying it to the point-to-point version of ICP leads to completely erroneous covariances. We then provide a formal mathematical proof why the approach is valid in the point-to-plane version of ICP, which validates the intuition and experimental results of practitioners.
Invariant EKF Design for Scan Matching-aided Localization
Mar 04, 2015
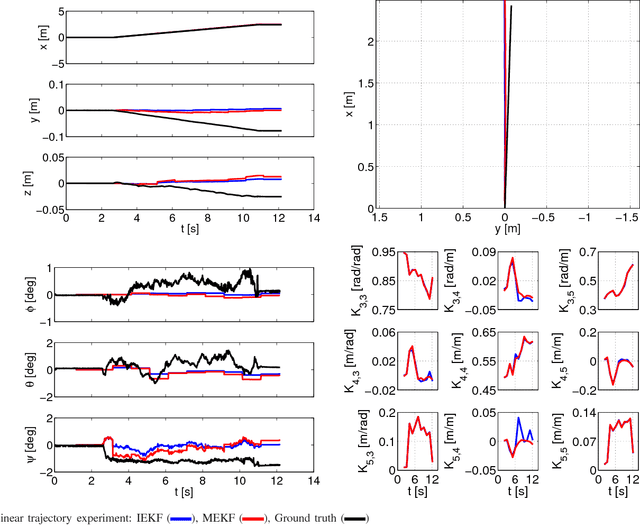
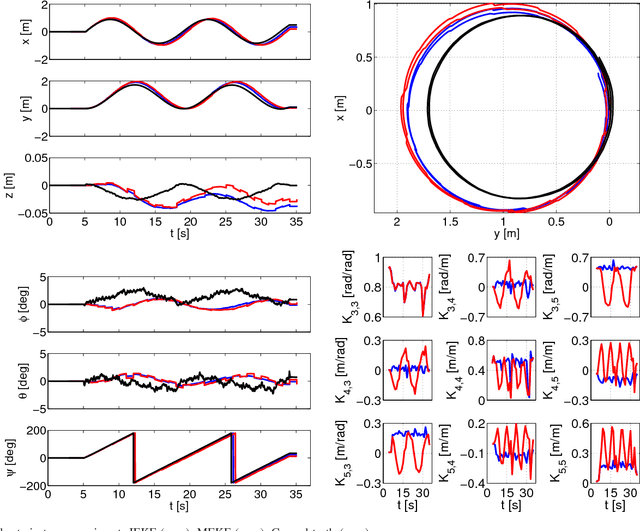
Localization in indoor environments is a technique which estimates the robot's pose by fusing data from onboard motion sensors with readings of the environment, in our case obtained by scan matching point clouds captured by a low-cost Kinect depth camera. We develop both an Invariant Extended Kalman Filter (IEKF)-based and a Multiplicative Extended Kalman Filter (MEKF)-based solution to this problem. The two designs are successfully validated in experiments and demonstrate the advantage of the IEKF design.
Experimental Implementation of an Invariant Extended Kalman Filter-based Scan Matching SLAM
Mar 20, 2014



We describe an application of the Invariant Extended Kalman Filter (IEKF) design methodology to the scan matching SLAM problem. We review the theoretical foundations of the IEKF and its practical interest of guaranteeing robustness to poor state estimates, then implement the filter on a wheeled robot hardware platform. The proposed design is successfully validated in experimental testing.