Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvariant EKF Design for Scan Matching-aided Localization
Paper and Code
Mar 04, 2015
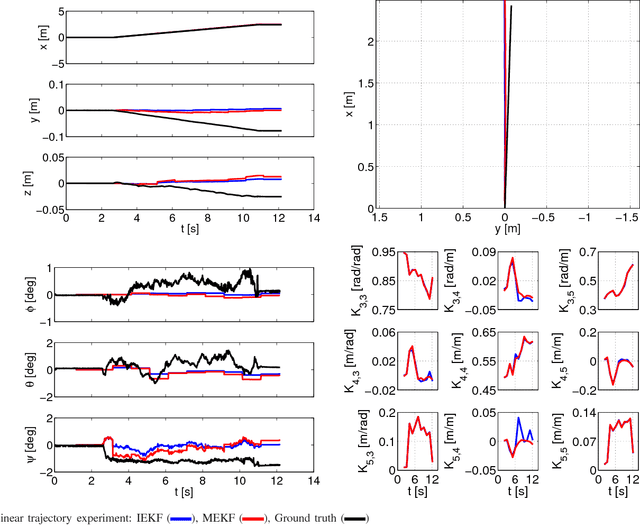
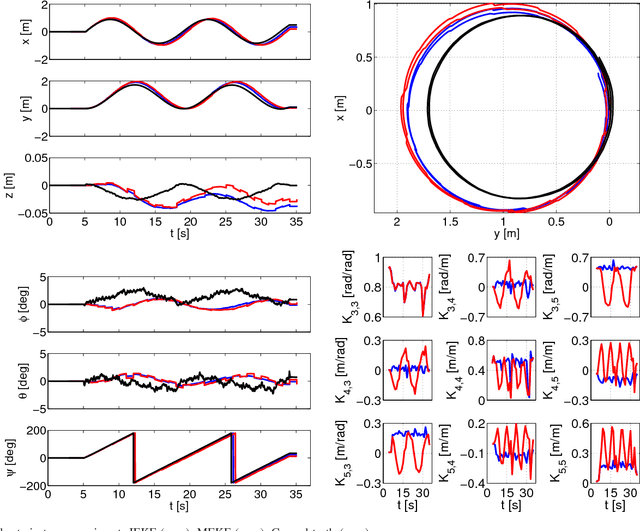
Localization in indoor environments is a technique which estimates the robot's pose by fusing data from onboard motion sensors with readings of the environment, in our case obtained by scan matching point clouds captured by a low-cost Kinect depth camera. We develop both an Invariant Extended Kalman Filter (IEKF)-based and a Multiplicative Extended Kalman Filter (MEKF)-based solution to this problem. The two designs are successfully validated in experiments and demonstrate the advantage of the IEKF design.
View paper on