 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIROSA: Interactive Robot Skill Adaptation using Natural Language
Mar 04, 2026Foundation models have demonstrated impressive capabilities across diverse domains, while imitation learning provides principled methods for robot skill adaptation from limited data. Combining these approaches holds significant promise for direct application to robotics, yet this combination has received limited attention, particularly for industrial deployment. We present a novel framework that enables open-vocabulary skill adaptation through a tool-based architecture, maintaining a protective abstraction layer between the language model and robot hardware. Our approach leverages pre-trained LLMs to select and parameterize specific tools for adapting robot skills without requiring fine-tuning or direct model-to-robot interaction. We demonstrate the framework on a 7-DoF torque-controlled robot performing an industrial bearing ring insertion task, showing successful skill adaptation through natural language commands for speed adjustment, trajectory correction, and obstacle avoidance while maintaining safety, transparency, and interpretability.
Interactive incremental learning of generalizable skills with local trajectory modulation
Sep 09, 2024The problem of generalization in learning from demonstration (LfD) has received considerable attention over the years, particularly within the context of movement primitives, where a number of approaches have emerged. Recently, two important approaches have gained recognition. While one leverages via-points to adapt skills locally by modulating demonstrated trajectories, another relies on so-called task-parameterized models that encode movements with respect to different coordinate systems, using a product of probabilities for generalization. While the former are well-suited to precise, local modulations, the latter aim at generalizing over large regions of the workspace and often involve multiple objects. Addressing the quality of generalization by leveraging both approaches simultaneously has received little attention. In this work, we propose an interactive imitation learning framework that simultaneously leverages local and global modulations of trajectory distributions. Building on the kernelized movement primitives (KMP) framework, we introduce novel mechanisms for skill modulation from direct human corrective feedback. Our approach particularly exploits the concept of via-points to incrementally and interactively 1) improve the model accuracy locally, 2) add new objects to the task during execution and 3) extend the skill into regions where demonstrations were not provided. We evaluate our method on a bearing ring-loading task using a torque-controlled, 7-DoF, DLR SARA robot.
RECALL: Rehearsal-free Continual Learning for Object Classification
Sep 29, 2022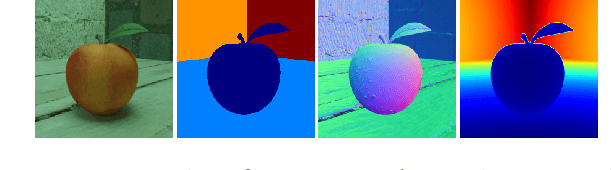
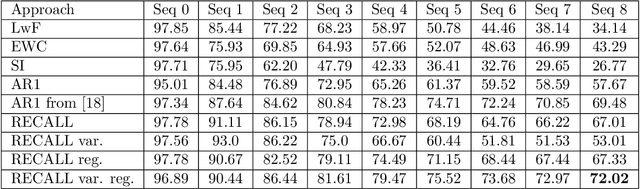
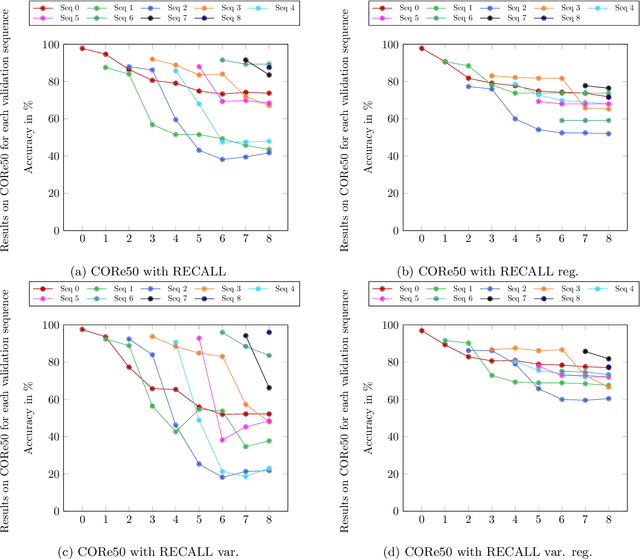
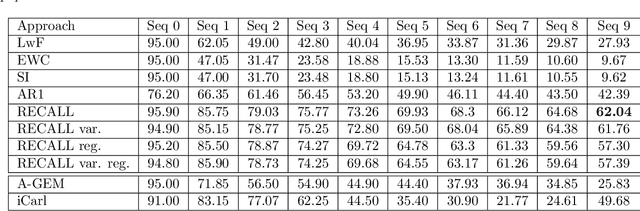
Convolutional neural networks show remarkable results in classification but struggle with learning new things on the fly. We present a novel rehearsal-free approach, where a deep neural network is continually learning new unseen object categories without saving any data of prior sequences. Our approach is called RECALL, as the network recalls categories by calculating logits for old categories before training new ones. These are then used during training to avoid changing the old categories. For each new sequence, a new head is added to accommodate the new categories. To mitigate forgetting, we present a regularization strategy where we replace the classification with a regression. Moreover, for the known categories, we propose a Mahalanobis loss that includes the variances to account for the changing densities between known and unknown categories. Finally, we present a novel dataset for continual learning, especially suited for object recognition on a mobile robot (HOWS-CL-25), including 150,795 synthetic images of 25 household object categories. Our approach RECALL outperforms the current state of the art on CORe50 and iCIFAR-100 and reaches the best performance on HOWS-CL-25.