 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Ad-Hoc Networks
Sep 09, 2024Practical robotic adhoc networks (RANETs), a type of mobile wireless adhoc networks (WANETs) supporting the WiFi-Direct modes common in internet of things and phone devices, is proposed based on a strategy of exploiting WiFi-Direct connection modes to overcome hardware restrictions. For a certain period of time the community was enthusiastic about the endless opportunities in fair, robust, efficient, and cheap communication created by the Adhoc mode of the WiFi IEEE 802.11 independent basic service set (IBSS) configuration that required no dedicated access points. The mode was a main enabler of wireless Adhoc networks (WANETS). This communication mode unfortunately did not get into the standard network cards present in IoT and mobile phones, likely due to the high energy consumption it exacts. Rather, such devices implement WiFi-Direct which is designed for star topologies. Several attempts were made to overcame the restriction and support WANETs, but they break at least the fairness and symmetry property, thereby reducing applicability. Here we show a solution for fair RANETs and evaluate the behavior of various strategies using simulations.
POMDPs for Robotic Arm Search and Reach to Known Objects
Apr 26, 2017
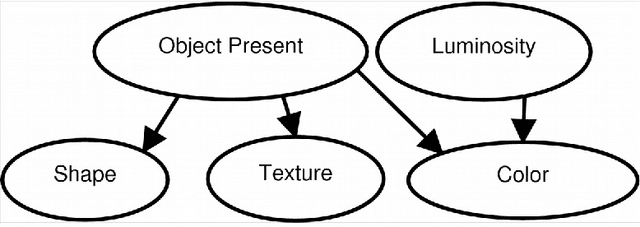
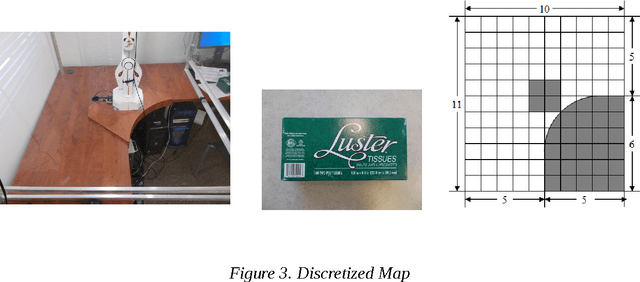
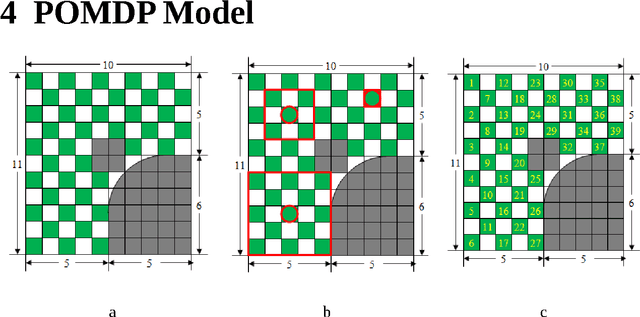
We propose an approach based on probabilistic models, in particular POMDPs, to plan optimized search processes of known objects by intelligent eye in hand robotic arms. Searching and reaching for a known object (a pen, a book, or a hammer) in one's office is an operation that humans perform frequently in their daily activities. There is no reason why intelligent robotic arms would not encounter this problem frequently in the various applications in which they are expected to serve. The problem suffers from uncertainties coming both from the lack of information about the position of the object, from noisy sensors, imperfect models of the target object, of imperfect models of the environment, and from approximations in computations. The use of probabilistic models helps us to mitigate at least a few of these challenges, approaching optimality for this important task.
Distributed Constraint Problems for Utilitarian Agents with Privacy Concerns, Recast as POMDPs
Mar 20, 2017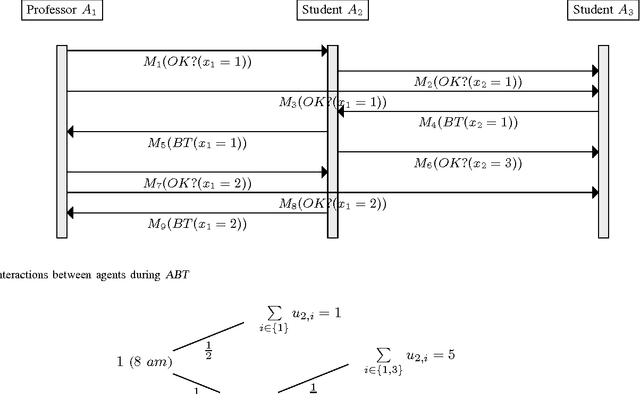
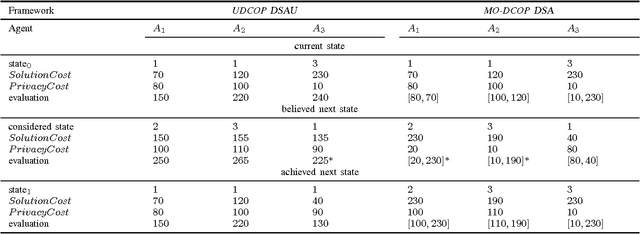
Privacy has traditionally been a major motivation for distributed problem solving. Distributed Constraint Satisfaction Problem (DisCSP) as well as Distributed Constraint Optimization Problem (DCOP) are fundamental models used to solve various families of distributed problems. Even though several approaches have been proposed to quantify and preserve privacy in such problems, none of them is exempt from limitations. Here we approach the problem by assuming that computation is performed among utilitarian agents. We introduce a utilitarian approach where the utility of each state is estimated as the difference between the reward for reaching an agreement on assignments of shared variables and the cost of privacy loss. We investigate extensions to solvers where agents integrate the utility function to guide their search and decide which action to perform, defining thereby their policy. We show that these extended solvers succeed in significantly reducing privacy loss without significant degradation of the solution quality.
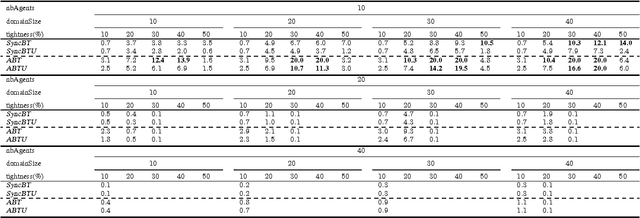
DisCSPs with Privacy Recast as Planning Problems for Utility-based Agents
Apr 22, 2016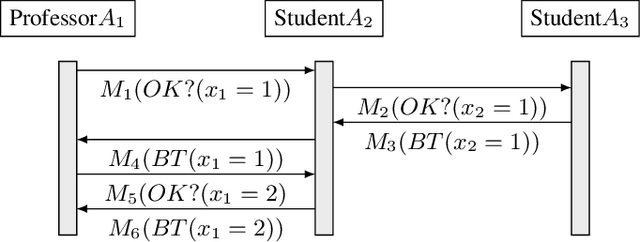
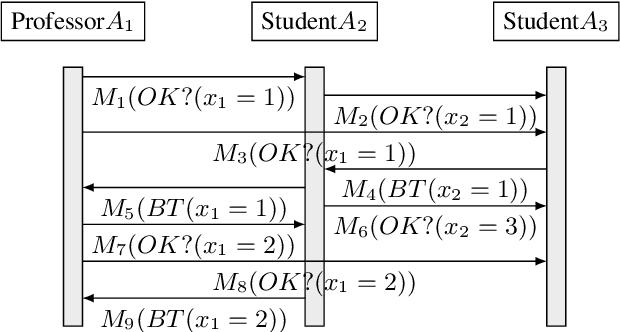
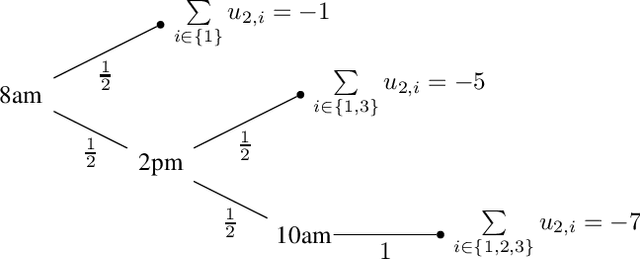
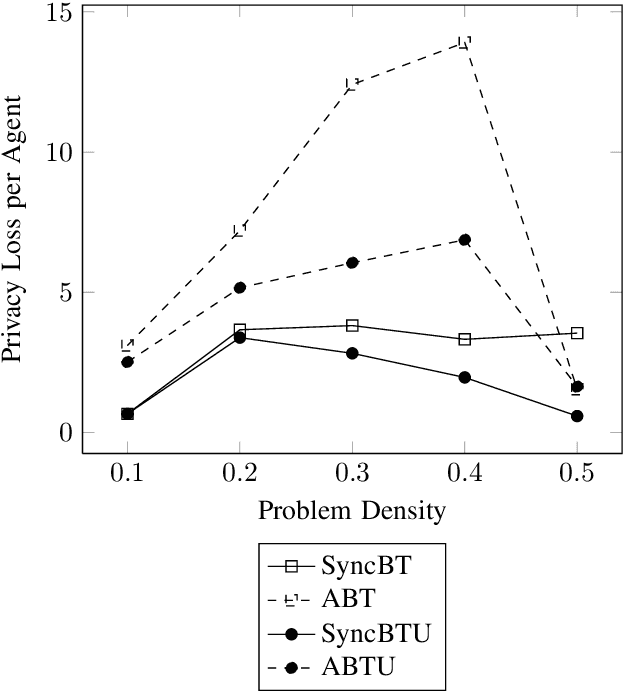
Privacy has traditionally been a major motivation for decentralized problem solving. However, even though several metrics have been proposed to quantify it, none of them is easily integrated with common solvers. Constraint programming is a fundamental paradigm used to approach various families of problems. We introduce Utilitarian Distributed Constraint Satisfaction Problems (UDisCSP) where the utility of each state is estimated as the difference between the the expected rewards for agreements on assignments for shared variables, and the expected cost of privacy loss. Therefore, a traditional DisCSP with privacy requirements is viewed as a planning problem. The actions available to agents are: communication and local inference. Common decentralized solvers are evaluated here from the point of view of their interpretation as greedy planners. Further, we investigate some simple extensions where these solvers start taking into account the utility function. In these extensions we assume that the planning problem is further restricting the set of communication actions to only the communication primitives present in the corresponding solver protocols. The solvers obtained for the new type of problems propose the action (communication/inference) to be performed in each situation, defining thereby the policy.
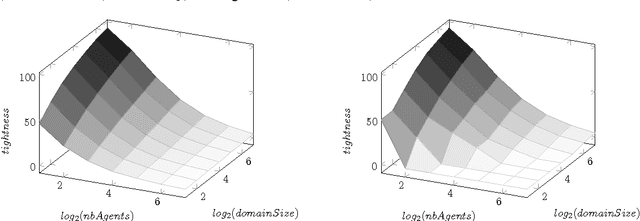
Utilitarian Distributed Constraint Optimization Problems
Apr 22, 2016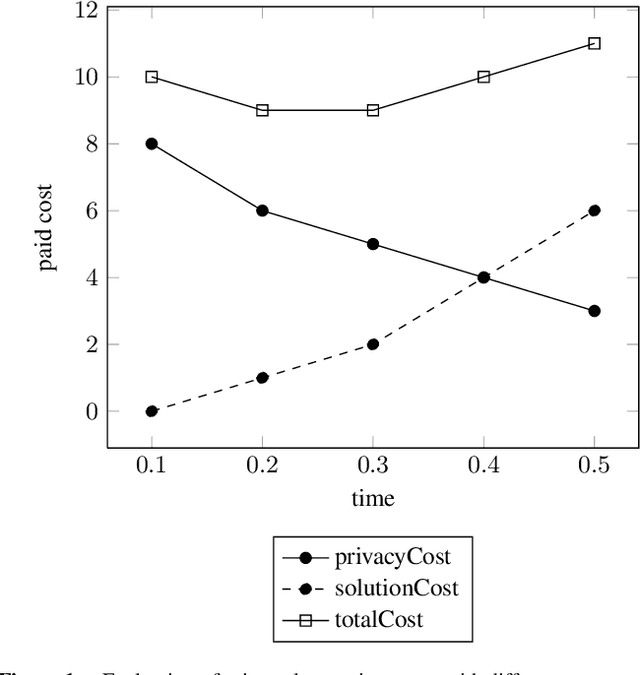
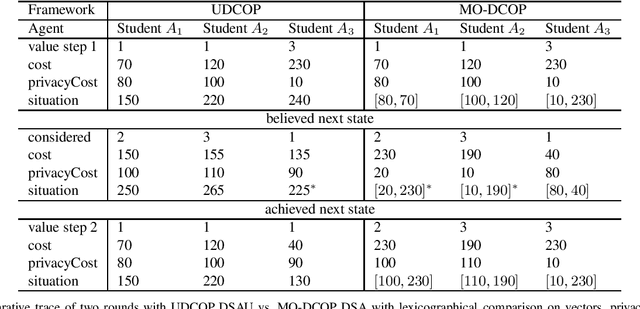
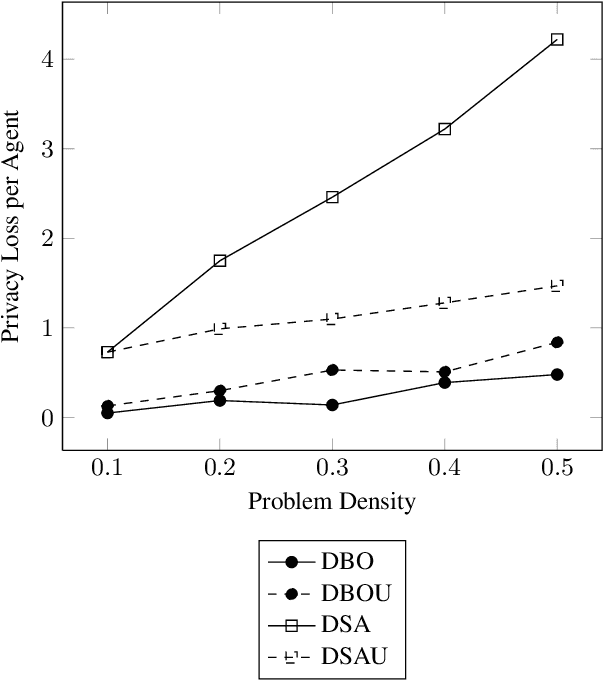
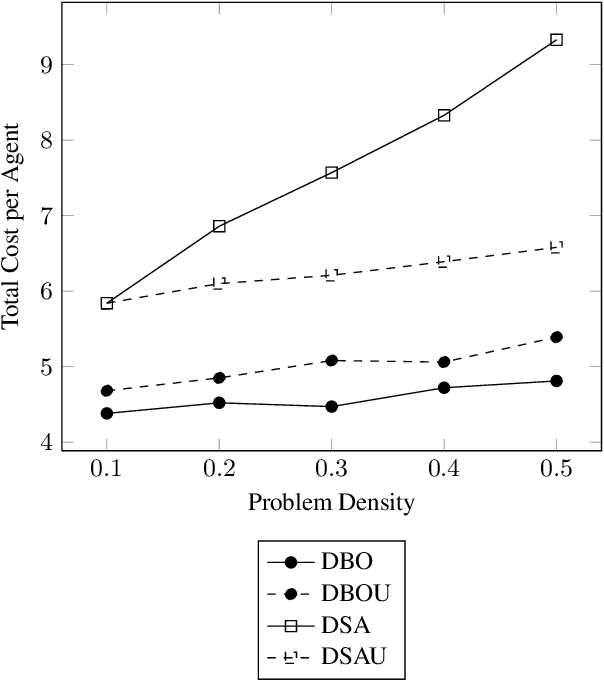
Privacy has been a major motivation for distributed problem optimization. However, even though several methods have been proposed to evaluate it, none of them is widely used. The Distributed Constraint Optimization Problem (DCOP) is a fundamental model used to approach various families of distributed problems. As privacy loss does not occur when a solution is accepted, but when it is proposed, privacy requirements cannot be interpreted as a criteria of the objective function of the DCOP. Here we approach the problem by letting both the optimized costs found in DCOPs and the privacy requirements guide the agents' exploration of the search space. We introduce Utilitarian Distributed Constraint Optimization Problem (UDCOP) where the costs and the privacy requirements are used as parameters to a heuristic modifying the search process. Common stochastic algorithms for decentralized constraint optimization problems are evaluated here according to how well they preserve privacy. Further, we propose some extensions where these solvers modify their search process to take into account their privacy requirements, succeeding in significantly reducing their privacy loss without significant degradation of the solution quality.