 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeE-SDS: Environment-aware See it, Do it, Sorted - Automated Environment-Aware Reinforcement Learning for Humanoid Locomotion
Dec 18, 2025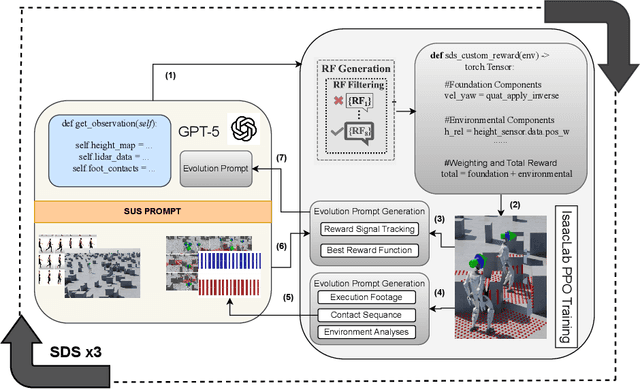
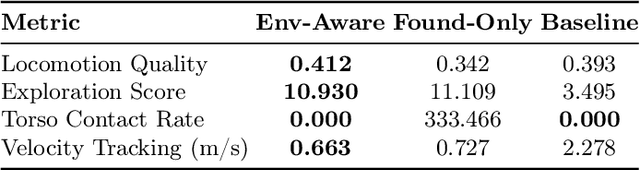
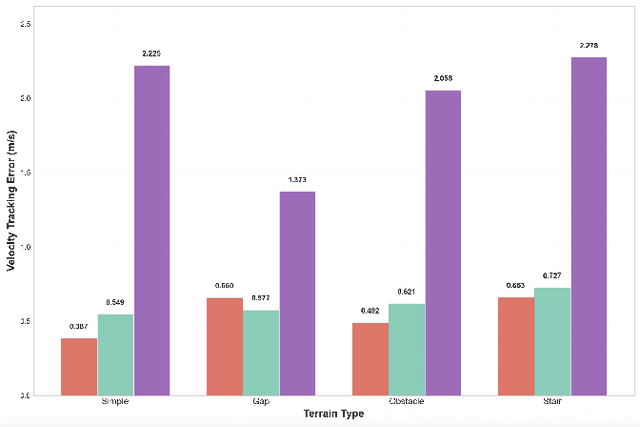
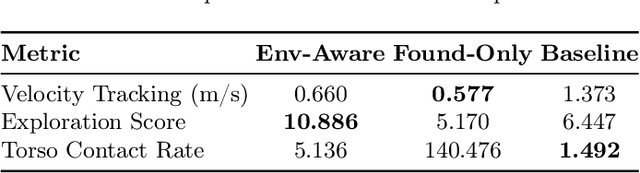
Vision-language models (VLMs) show promise in automating reward design in humanoid locomotion, which could eliminate the need for tedious manual engineering. However, current VLM-based methods are essentially "blind", as they lack the environmental perception required to navigate complex terrain. We present E-SDS (Environment-aware See it, Do it, Sorted), a framework that closes this perception gap. E-SDS integrates VLMs with real-time terrain sensor analysis to automatically generate reward functions that facilitate training of robust perceptive locomotion policies, grounded by example videos. Evaluated on a Unitree G1 humanoid across four distinct terrains (simple, gaps, obstacles, stairs), E-SDS uniquely enabled successful stair descent, while policies trained with manually-designed rewards or a non-perceptive automated baseline were unable to complete the task. In all terrains, E-SDS also reduced velocity tracking error by 51.9-82.6%. Our framework reduces the human effort of reward design from days to less than two hours while simultaneously producing more robust and capable locomotion policies.
* 12 pages, 3 figures, 4 tables. Accepted at RiTA 2025 (Springer LNNS)
SDS -- See it, Do it, Sorted: Quadruped Skill Synthesis from Single Video Demonstration
Oct 15, 2024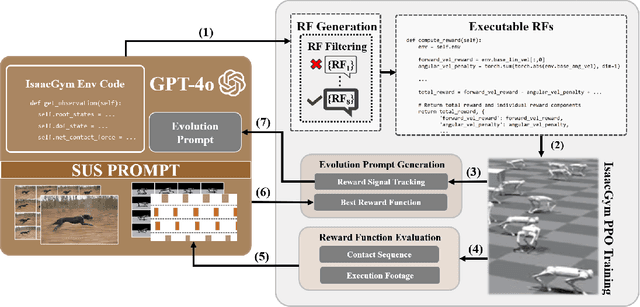
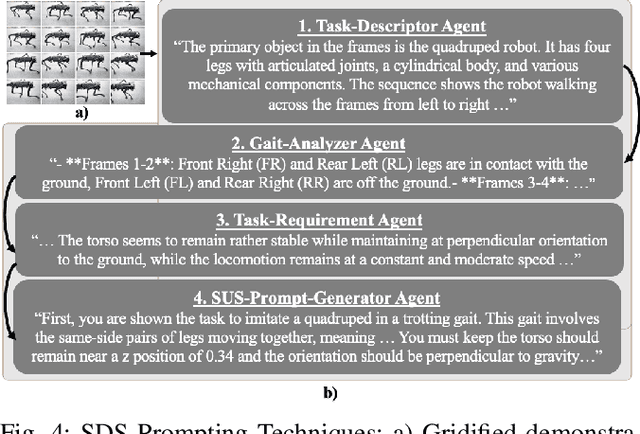
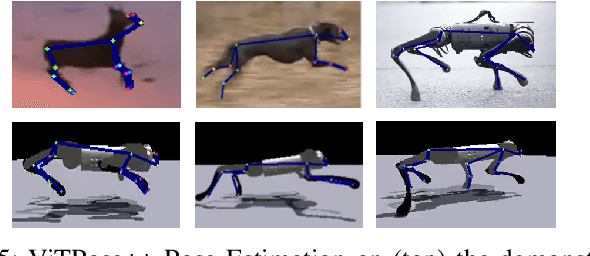
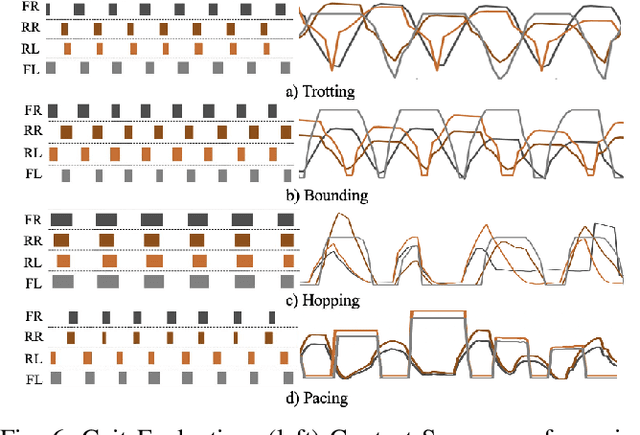
In this paper, we present SDS (``See it. Do it. Sorted.''), a novel pipeline for intuitive quadrupedal skill learning from a single demonstration video. Leveraging the Visual capabilities of GPT-4o, SDS processes input videos through our novel chain-of-thought promoting technique (SUS) and generates executable reward functions (RFs) that drive the imitation of locomotion skills, through learning a Proximal Policy Optimization (PPO)-based Reinforcement Learning (RL) policy, using environment information from the NVIDIA IsaacGym simulator. SDS autonomously evaluates the RFs by monitoring the individual reward components and supplying training footage and fitness metrics back into GPT-4o, which is then prompted to evolve the RFs to achieve higher task fitness at each iteration. We validate our method on the Unitree Go1 robot, demonstrating its ability to execute variable skills such as trotting, bounding, pacing and hopping, achieving high imitation fidelity and locomotion stability. SDS shows improvements over SOTA methods in task adaptability, reduced dependence on domain-specific knowledge, and bypassing the need for labor-intensive reward engineering and large-scale training datasets. Additional information and the open-sourced code can be found in: https://rpl-cs-ucl.github.io/SDSweb
DiPPeST: Diffusion-based Path Planner for Synthesizing Trajectories Applied on Quadruped Robots
May 29, 2024



We present DiPPeST, a novel image and goal conditioned diffusion-based trajectory generator for quadrupedal robot path planning. DiPPeST is a zero-shot adaptation of our previously introduced diffusion-based 2D global trajectory generator (DiPPeR). The introduced system incorporates a novel strategy for local real-time path refinements, that is reactive to camera input, without requiring any further training, image processing, or environment interpretation techniques. DiPPeST achieves 92% success rate in obstacle avoidance for nominal environments and an average of 88% success rate when tested in environments that are up to 3.5 times more complex in pixel variation than DiPPeR. A visual-servoing framework is developed to allow for real-world execution, tested on the quadruped robot, achieving 80% success rate in different environments and showcasing improved behavior than complex state-of-the-art local planners, in narrow environments.
DiPPeR: Diffusion-based 2D Path Planner applied on Legged Robots
Oct 11, 2023



In this work, we present DiPPeR, a novel and fast 2D path planning framework for quadrupedal locomotion, leveraging diffusion-driven techniques. Our contributions include a scalable dataset of map images and corresponding end-to-end trajectories, an image-conditioned diffusion planner for mobile robots, and a training/inference pipeline employing CNNs. We validate our approach in several mazes, as well as in real-world deployment scenarios on Boston Dynamic's Spot and Unitree's Go1 robots. DiPPeR performs on average 70 times faster for trajectory generation against both search based and data driven path planning algorithms with an average of 80% consistency in producing feasible paths of various length in maps of variable size, and obstacle structure.