 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusionRL: Efficient Training of Diffusion Policies for Robotic Grasping Using RL-Adapted Large-Scale Datasets
May 24, 2025Diffusion models have been successfully applied in areas such as image, video, and audio generation. Recent works show their promise for sequential decision-making and dexterous manipulation, leveraging their ability to model complex action distributions. However, challenges persist due to the data limitations and scenario-specific adaptation needs. In this paper, we address these challenges by proposing an optimized approach to training diffusion policies using large, pre-built datasets that are enhanced using Reinforcement Learning (RL). Our end-to-end pipeline leverages RL-based enhancement of the DexGraspNet dataset, lightweight diffusion policy training on a dexterous manipulation task for a five-fingered robotic hand, and a pose sampling algorithm for validation. The pipeline achieved a high success rate of 80% for three DexGraspNet objects. By eliminating manual data collection, our approach lowers barriers to adopting diffusion models in robotics, enhancing generalization and robustness for real-world applications.
CONTHER: Human-Like Contextual Robot Learning via Hindsight Experience Replay and Transformers without Expert Demonstrations
Mar 20, 2025
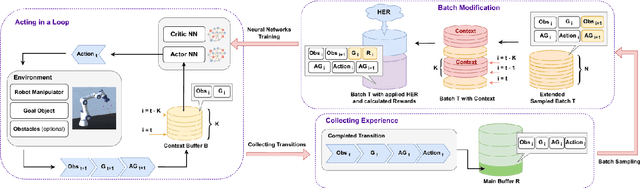


This paper presents CONTHER, a novel reinforcement learning algorithm designed to efficiently and rapidly train robotic agents for goal-oriented manipulation tasks and obstacle avoidance. The algorithm uses a modified replay buffer inspired by the Hindsight Experience Replay (HER) approach to artificially populate experience with successful trajectories, effectively addressing the problem of sparse reward scenarios and eliminating the need to manually collect expert demonstrations. The developed algorithm proposes a Transformer-based architecture to incorporate the context of previous states, allowing the agent to perform a deeper analysis and make decisions in a manner more akin to human learning. The effectiveness of the built-in replay buffer, which acts as an "internal demonstrator", is twofold: it accelerates learning and allows the algorithm to adapt to different tasks. Empirical data confirm the superiority of the algorithm by an average of 38.46% over other considered methods, and the most successful baseline by 28.21%, showing higher success rates and faster convergence in the point-reaching task. Since the control is performed through the robot's joints, the algorithm facilitates potential adaptation to a real robot system and construction of an obstacle avoidance task. Therefore, the algorithm has also been tested on tasks requiring following a complex dynamic trajectory and obstacle avoidance. The design of the algorithm ensures its applicability to a wide range of goal-oriented tasks, making it an easily integrated solution for real-world robotics applications.
Robotic framework for autonomous manipulation of laboratory equipment with different degrees of transparency via 6D pose estimation
Oct 10, 2024



Many modern robotic systems operate autonomously, however they often lack the ability to accurately analyze the environment and adapt to changing external conditions, while teleoperation systems often require special operator skills. In the field of laboratory automation, the number of automated processes is growing, however such systems are usually developed to perform specific tasks. In addition, many of the objects used in this field are transparent, making it difficult to analyze them using visual channels. The contributions of this work include the development of a robotic framework with autonomous mode for manipulating liquid-filled objects with different degrees of transparency in complex pose combinations. The conducted experiments demonstrated the robustness of the designed visual perception system to accurately estimate object poses for autonomous manipulation, and confirmed the performance of the algorithms in dexterous operations such as liquid dispensing. The proposed robotic framework can be applied for laboratory automation, since it allows solving the problem of performing non-trivial manipulation tasks with the analysis of object poses of varying degrees of transparency and liquid levels, requiring high accuracy and repeatability.