 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCONTHER: Human-Like Contextual Robot Learning via Hindsight Experience Replay and Transformers without Expert Demonstrations
Paper and Code
Mar 20, 2025
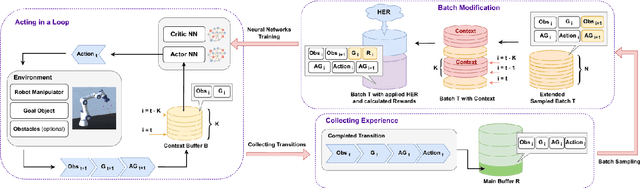


This paper presents CONTHER, a novel reinforcement learning algorithm designed to efficiently and rapidly train robotic agents for goal-oriented manipulation tasks and obstacle avoidance. The algorithm uses a modified replay buffer inspired by the Hindsight Experience Replay (HER) approach to artificially populate experience with successful trajectories, effectively addressing the problem of sparse reward scenarios and eliminating the need to manually collect expert demonstrations. The developed algorithm proposes a Transformer-based architecture to incorporate the context of previous states, allowing the agent to perform a deeper analysis and make decisions in a manner more akin to human learning. The effectiveness of the built-in replay buffer, which acts as an "internal demonstrator", is twofold: it accelerates learning and allows the algorithm to adapt to different tasks. Empirical data confirm the superiority of the algorithm by an average of 38.46% over other considered methods, and the most successful baseline by 28.21%, showing higher success rates and faster convergence in the point-reaching task. Since the control is performed through the robot's joints, the algorithm facilitates potential adaptation to a real robot system and construction of an obstacle avoidance task. Therefore, the algorithm has also been tested on tasks requiring following a complex dynamic trajectory and obstacle avoidance. The design of the algorithm ensures its applicability to a wide range of goal-oriented tasks, making it an easily integrated solution for real-world robotics applications.