 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull-Velocity Radar Returns by Radar-Camera Fusion
Aug 24, 2021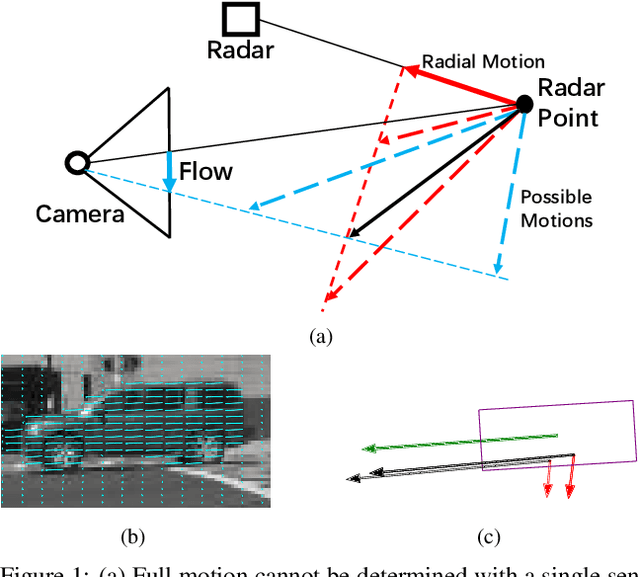
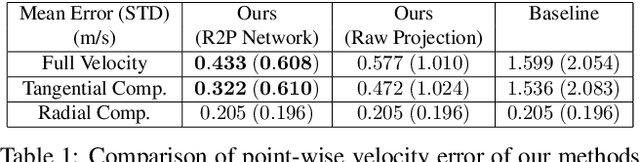
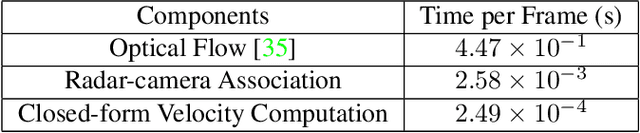
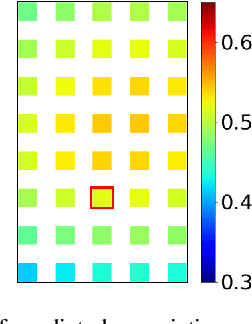
A distinctive feature of Doppler radar is the measurement of velocity in the radial direction for radar points. However, the missing tangential velocity component hampers object velocity estimation as well as temporal integration of radar sweeps in dynamic scenes. Recognizing that fusing camera with radar provides complementary information to radar, in this paper we present a closed-form solution for the point-wise, full-velocity estimate of Doppler returns using the corresponding optical flow from camera images. Additionally, we address the association problem between radar returns and camera images with a neural network that is trained to estimate radar-camera correspondences. Experimental results on the nuScenes dataset verify the validity of the method and show significant improvements over the state-of-the-art in velocity estimation and accumulation of radar points.
Radar-Camera Pixel Depth Association for Depth Completion
Jun 05, 2021



While radar and video data can be readily fused at the detection level, fusing them at the pixel level is potentially more beneficial. This is also more challenging in part due to the sparsity of radar, but also because automotive radar beams are much wider than a typical pixel combined with a large baseline between camera and radar, which results in poor association between radar pixels and color pixel. A consequence is that depth completion methods designed for LiDAR and video fare poorly for radar and video. Here we propose a radar-to-pixel association stage which learns a mapping from radar returns to pixels. This mapping also serves to densify radar returns. Using this as a first stage, followed by a more traditional depth completion method, we are able to achieve image-guided depth completion with radar and video. We demonstrate performance superior to camera and radar alone on the nuScenes dataset. Our source code is available at https://github.com/longyunf/rc-pda.