 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReLight My NeRF: A Dataset for Novel View Synthesis and Relighting of Real World Objects
Apr 20, 2023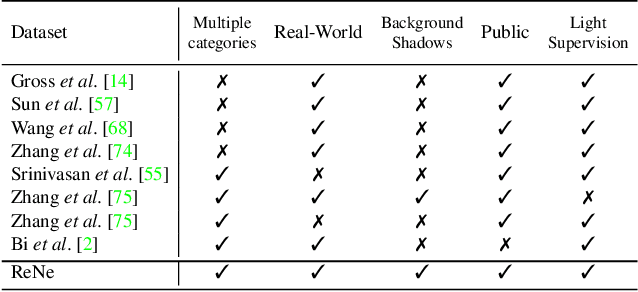



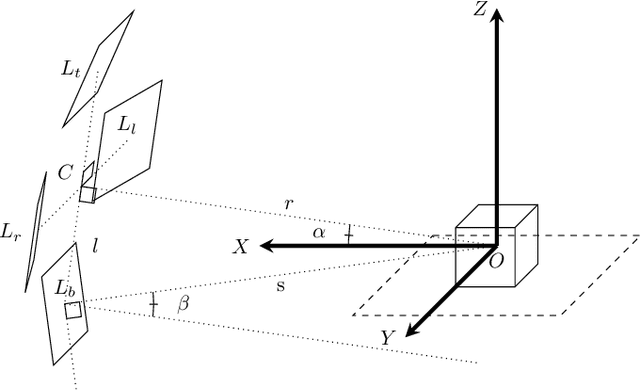
In this paper, we focus on the problem of rendering novel views from a Neural Radiance Field (NeRF) under unobserved light conditions. To this end, we introduce a novel dataset, dubbed ReNe (Relighting NeRF), framing real world objects under one-light-at-time (OLAT) conditions, annotated with accurate ground-truth camera and light poses. Our acquisition pipeline leverages two robotic arms holding, respectively, a camera and an omni-directional point-wise light source. We release a total of 20 scenes depicting a variety of objects with complex geometry and challenging materials. Each scene includes 2000 images, acquired from 50 different points of views under 40 different OLAT conditions. By leveraging the dataset, we perform an ablation study on the relighting capability of variants of the vanilla NeRF architecture and identify a lightweight architecture that can render novel views of an object under novel light conditions, which we use to establish a non-trivial baseline for the dataset. Dataset and benchmark are available at https://eyecan-ai.github.io/rene.
The Eyecandies Dataset for Unsupervised Multimodal Anomaly Detection and Localization
Oct 10, 2022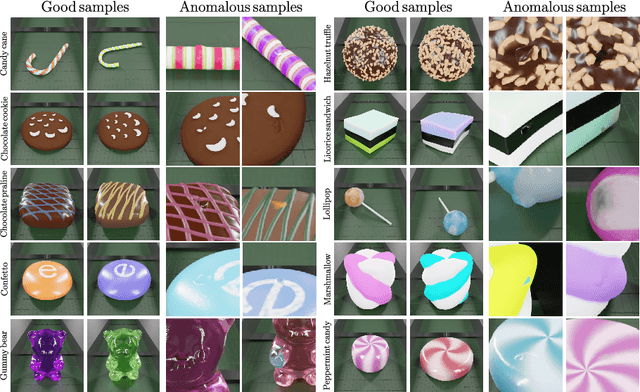
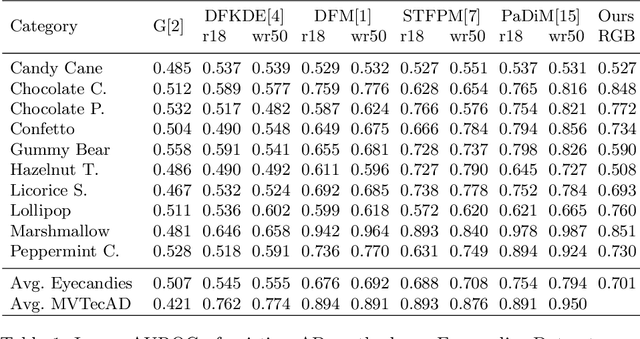
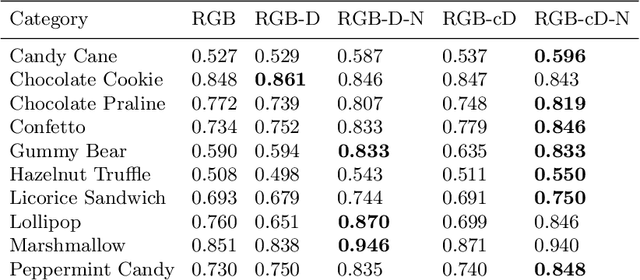
We present Eyecandies, a novel synthetic dataset for unsupervised anomaly detection and localization. Photo-realistic images of procedurally generated candies are rendered in a controlled environment under multiple lightning conditions, also providing depth and normal maps in an industrial conveyor scenario. We make available anomaly-free samples for model training and validation, while anomalous instances with precise ground-truth annotations are provided only in the test set. The dataset comprises ten classes of candies, each showing different challenges, such as complex textures, self-occlusions and specularities. Furthermore, we achieve large intra-class variation by randomly drawing key parameters of a procedural rendering pipeline, which enables the creation of an arbitrary number of instances with photo-realistic appearance. Likewise, anomalies are injected into the rendering graph and pixel-wise annotations are automatically generated, overcoming human-biases and possible inconsistencies. We believe this dataset may encourage the exploration of original approaches to solve the anomaly detection task, e.g. by combining color, depth and normal maps, as they are not provided by most of the existing datasets. Indeed, in order to demonstrate how exploiting additional information may actually lead to higher detection performance, we show the results obtained by training a deep convolutional autoencoder to reconstruct different combinations of inputs.