 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePreference Elicitation for Step-Wise Explanations in Logic Puzzles
Nov 13, 2025Step-wise explanations can explain logic puzzles and other satisfaction problems by showing how to derive decisions step by step. Each step consists of a set of constraints that derive an assignment to one or more decision variables. However, many candidate explanation steps exist, with different sets of constraints and different decisions they derive. To identify the most comprehensible one, a user-defined objective function is required to quantify the quality of each step. However, defining a good objective function is challenging. Here, interactive preference elicitation methods from the wider machine learning community can offer a way to learn user preferences from pairwise comparisons. We investigate the feasibility of this approach for step-wise explanations and address several limitations that distinguish it from elicitation for standard combinatorial problems. First, because the explanation quality is measured using multiple sub-objectives that can vary a lot in scale, we propose two dynamic normalization techniques to rescale these features and stabilize the learning process. We also observed that many generated comparisons involve similar explanations. For this reason, we introduce MACHOP (Multi-Armed CHOice Perceptron), a novel query generation strategy that integrates non-domination constraints with upper confidence bound-based diversification. We evaluate the elicitation techniques on Sudokus and Logic-Grid puzzles using artificial users, and validate them with a real-user evaluation. In both settings, MACHOP consistently produces higher-quality explanations than the standard approach.
Decision-Focused Learning to Predict Action Costs for Planning
Aug 13, 2024

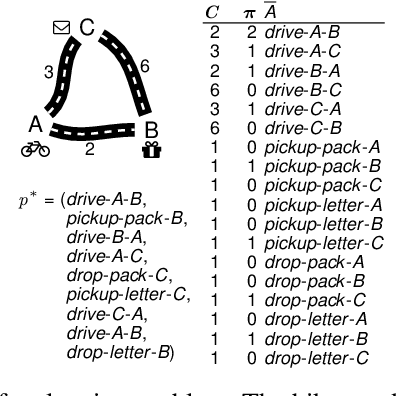

In many automated planning applications, action costs can be hard to specify. An example is the time needed to travel through a certain road segment, which depends on many factors, such as the current weather conditions. A natural way to address this issue is to learn to predict these parameters based on input features (e.g., weather forecasts) and use the predicted action costs in automated planning afterward. Decision-Focused Learning (DFL) has been successful in learning to predict the parameters of combinatorial optimization problems in a way that optimizes solution quality rather than prediction quality. This approach yields better results than treating prediction and optimization as separate tasks. In this paper, we investigate for the first time the challenges of implementing DFL for automated planning in order to learn to predict the action costs. There are two main challenges to overcome: (1) planning systems are called during gradient descent learning, to solve planning problems with negative action costs, which are not supported in planning. We propose novel methods for gradient computation to avoid this issue. (2) DFL requires repeated planner calls during training, which can limit the scalability of the method. We experiment with different methods approximating the optimal plan as well as an easy-to-implement caching mechanism to speed up the learning process. As the first work that addresses DFL for automated planning, we demonstrate that the proposed gradient computation consistently yields significantly better plans than predictions aimed at minimizing prediction error; and that caching can temper the computation requirements.