 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced 6D Pose Estimation for Robotic Fruit Picking
May 25, 2023This paper proposes a novel method to refine the 6D pose estimation inferred by an instance-level deep neural network which processes a single RGB image and that has been trained on synthetic images only. The proposed optimization algorithm usefully exploits the depth measurement of a standard RGB-D camera to estimate the dimensions of the considered object, even though the network is trained on a single CAD model of the same object with given dimensions. The improved accuracy in the pose estimation allows a robot to grasp apples of various types and significantly different dimensions successfully; this was not possible using the standard pose estimation algorithm, except for the fruits with dimensions very close to those of the CAD drawing used in the training process. Grasping fresh fruits without damaging each item also demands a suitable grasp force control. A parallel gripper equipped with special force/tactile sensors is thus adopted to achieve safe grasps with the minimum force necessary to lift the fruits without any slippage and any deformation at the same time, with no knowledge of their weight.
Manipulation Planning and Control for Shelf Replenishment
Dec 23, 2019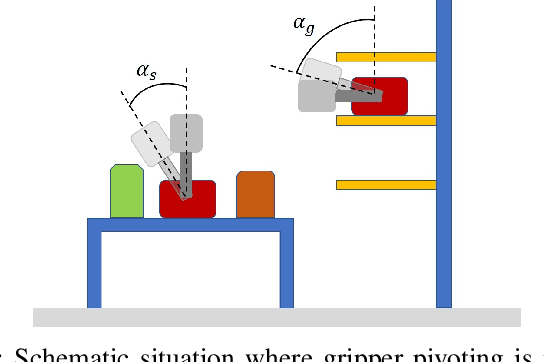
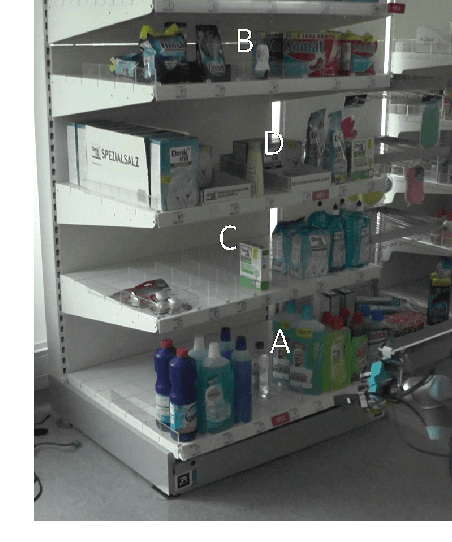
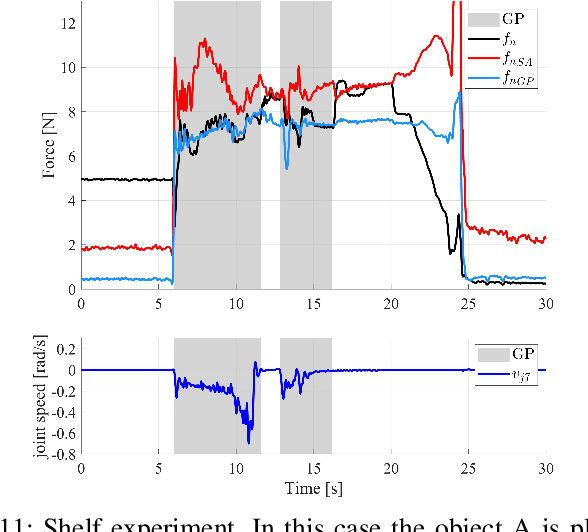
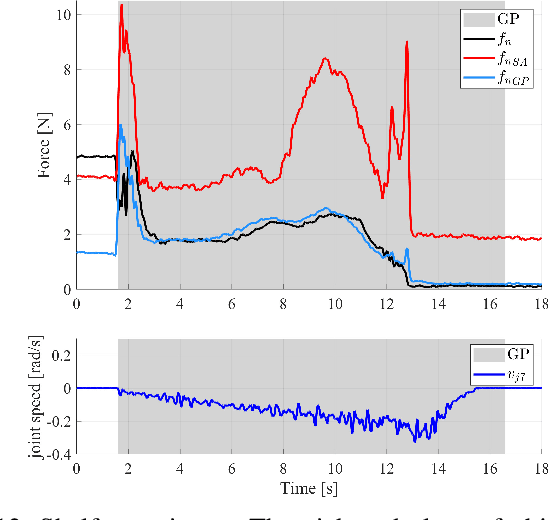
Manipulation planning and control are relevant building blocks of a robotic system and their tight integration is a key factor to improve robot autonomy and allows robots to perform manipulation tasks of increasing complexity, such as those needed in the in-store logistics domain. Supermarkets contain a large variety of objects to be placed on the shelf layers with specific constraints, doing this with a robot is a challenge and requires a high dexterity. However, an integration of reactive grasping control and motion planning can allow robots to perform such tasks even with grippers with limited dexterity. The main contribution of the paper is a novel method for planning manipulation tasks to be executed using a reactive control layer that provides more control modalities, i.e., slipping avoidance and controlled sliding. Experiments with a new force/tactile sensor equipping the gripper of a mobile manipulator show that the approach allows the robot to successfully perform manipulation tasks unfeasible with a standard fixed grasp.