 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAP Inference for Probabilistic Logic Programming
Sep 01, 2020
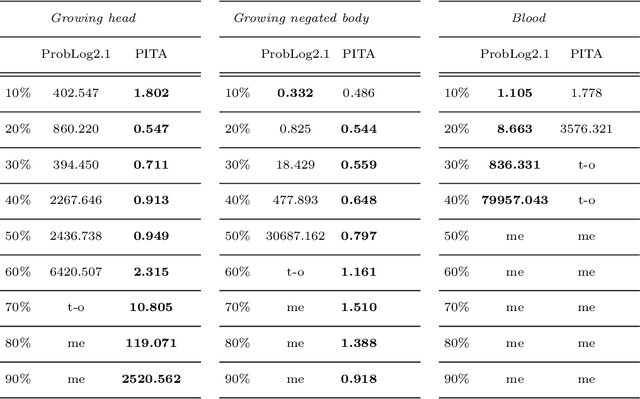
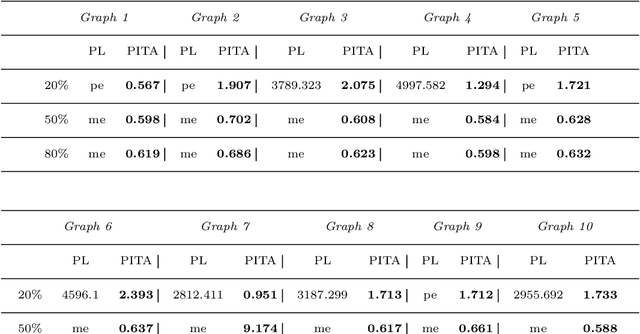
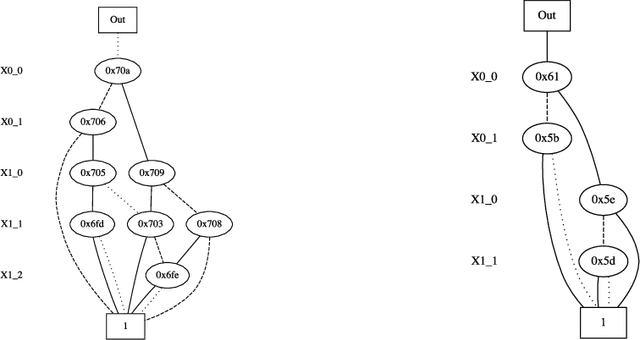
In Probabilistic Logic Programming (PLP) the most commonly studied inference task is to compute the marginal probability of a query given a program. In this paper, we consider two other important tasks in the PLP setting: the Maximum-A-Posteriori (MAP) inference task, which determines the most likely values for a subset of the random variables given evidence on other variables, and the Most Probable Explanation (MPE) task, the instance of MAP where the query variables are the complement of the evidence variables. We present a novel algorithm, included in the PITA reasoner, which tackles these tasks by representing each problem as a Binary Decision Diagram and applying a dynamic programming procedure on it. We compare our algorithm with the version of ProbLog that admits annotated disjunctions and can perform MAP and MPE inference. Experiments on several synthetic datasets show that PITA outperforms ProbLog in many cases.
A Bayesian Approach to Conversational Recommendation Systems
Feb 12, 2020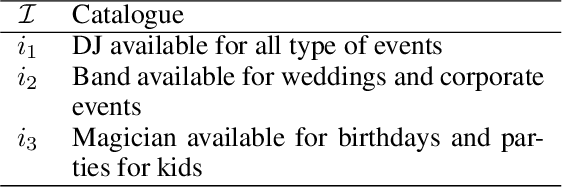
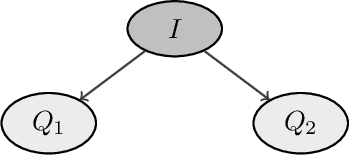
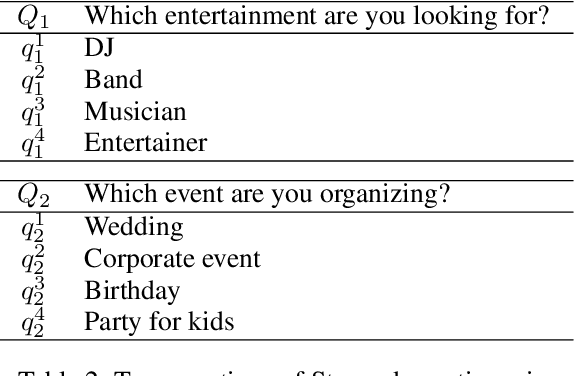
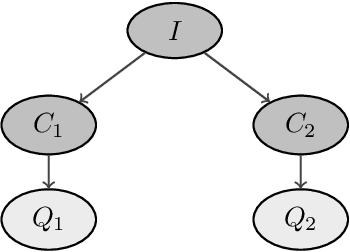
We present a conversational recommendation system based on a Bayesian approach. A probability mass function over the items is updated after any interaction with the user, with information-theoretic criteria optimally shaping the interaction and deciding when the conversation should be terminated and the most probable item consequently recommended. Dedicated elicitation techniques for the prior probabilities of the parameters modeling the interactions are derived from basic structural judgements. Such prior information can be combined with historical data to discriminate items with different recommendation histories. A case study based on the application of this approach to \emph{stagend.com}, an online platform for booking entertainers, is finally discussed together with an empirical analysis showing the advantages in terms of recommendation quality and efficiency.
A CHR-based Implementation of Known Arc-Consistency
Aug 24, 2004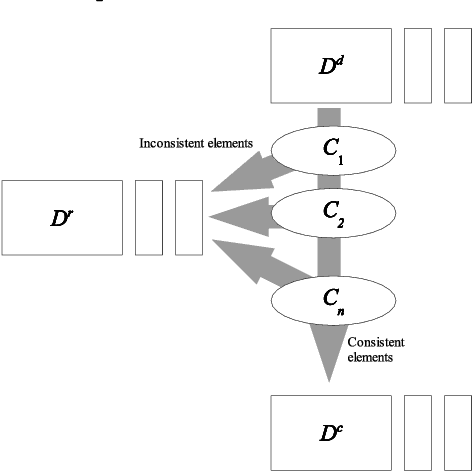
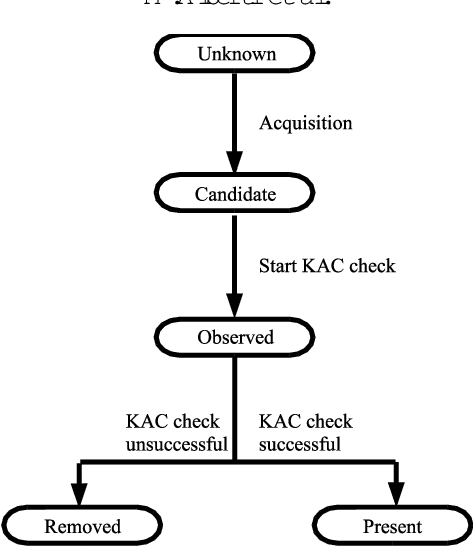
In classical CLP(FD) systems, domains of variables are completely known at the beginning of the constraint propagation process. However, in systems interacting with an external environment, acquiring the whole domains of variables before the beginning of constraint propagation may cause waste of computation time, or even obsolescence of the acquired data at the time of use. For such cases, the Interactive Constraint Satisfaction Problem (ICSP) model has been proposed as an extension of the CSP model, to make it possible to start constraint propagation even when domains are not fully known, performing acquisition of domain elements only when necessary, and without the need for restarting the propagation after every acquisition. In this paper, we show how a solver for the two sorted CLP language, defined in previous work, to express ICSPs, has been implemented in the Constraint Handling Rules (CHR) language, a declarative language particularly suitable for high level implementation of constraint solvers.