 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable Inverse Graphics for Zero-shot Scene Reconstruction and Robot Grasping
Feb 04, 2026Operating effectively in novel real-world environments requires robotic systems to estimate and interact with previously unseen objects. Current state-of-the-art models address this challenge by using large amounts of training data and test-time samples to build black-box scene representations. In this work, we introduce a differentiable neuro-graphics model that combines neural foundation models with physics-based differentiable rendering to perform zero-shot scene reconstruction and robot grasping without relying on any additional 3D data or test-time samples. Our model solves a series of constrained optimization problems to estimate physically consistent scene parameters, such as meshes, lighting conditions, material properties, and 6D poses of previously unseen objects from a single RGBD image and bounding boxes. We evaluated our approach on standard model-free few-shot benchmarks and demonstrated that it outperforms existing algorithms for model-free few-shot pose estimation. Furthermore, we validated the accuracy of our scene reconstructions by applying our algorithm to a zero-shot grasping task. By enabling zero-shot, physically-consistent scene reconstruction and grasping without reliance on extensive datasets or test-time sampling, our approach offers a pathway towards more data efficient, interpretable and generalizable robot autonomy in novel environments.
A Survey of Behavior Learning Applications in Robotics -- State of the Art and Perspectives
Jun 05, 2019
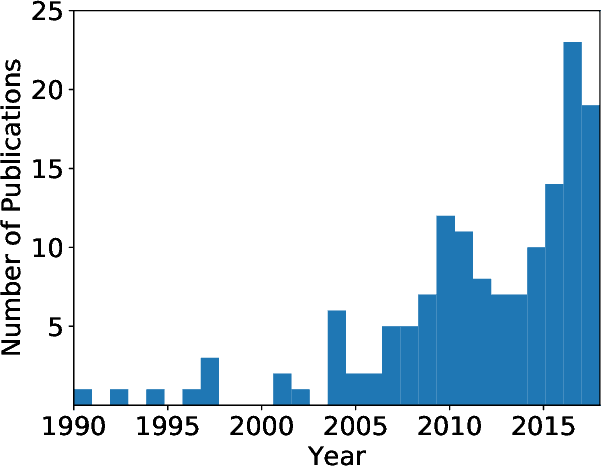

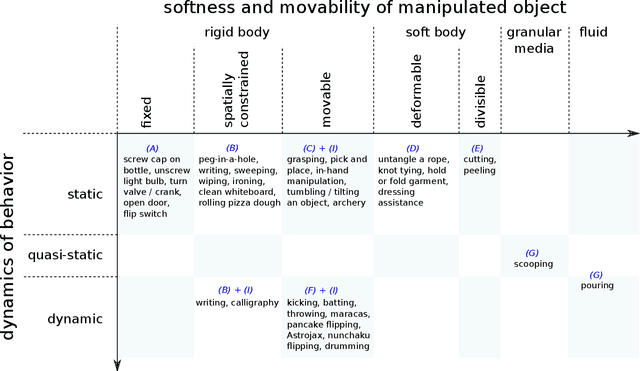
Recent success of machine learning in many domains has been overwhelming, which often leads to false expectations regarding the capabilities of behavior learning in robotics. In this survey, we analyze the current state of machine learning for robotic behaviors. We will give a broad overview of behaviors that have been learned and used on real robots. Our focus is on kinematically or sensorially complex robots. That includes humanoid robots or parts of humanoid robots, for example, legged robots or robotic arms. We will classify presented behaviors according to various categories and we will draw conclusions about what can be learned and what should be learned. Furthermore, we will give an outlook on problems that are challenging today but might be solved by machine learning in the future and argue that classical robotics and other approaches from artificial intelligence should be integrated more with machine learning to form complete, autonomous systems.