 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDo Robots Really Need Anthropomorphic Hands?
Aug 07, 2025



Human manipulation skills represent a pinnacle of their voluntary motor functions, requiring the coordination of many degrees of freedom and processing of high-dimensional sensor input to achieve such a high level of dexterity. Thus, we set out to answer whether the human hand, with its associated biomechanical properties, sensors, and control mechanisms, is an ideal that we should strive for in robotics-do we really need anthropomorphic robotic hands? This survey can help practitioners to make the trade-off between hand complexity and potential manipulation skills. We provide an overview of the human hand, a comparison of commercially available robotic and prosthetic hands, and a systematic review of hand mechanisms and skills that they are capable of. This leads to follow-up questions. What is the minimum requirement for mechanisms and sensors to implement most skills that a robot needs? What is missing to reach human-level dexterity? Can we improve upon human dexterity? Although complex five-fingered hands are often used as the ultimate goal for robotic manipulators, they are not necessary for all tasks. We found that wrist flexibility and finger abduction/adduction are important for manipulation capabilities. On the contrary, increasing the number of fingers, actuators, or degrees of freedom is often not necessary. Three fingers are a good compromise between simplicity and dexterity. Non-anthropomorphic hand designs with two opposing pairs of fingers or human hands with six fingers can further increase dexterity, suggesting that the human hand may not be the optimum.
A Modular Approach to the Embodiment of Hand Motions from Human Demonstrations
Mar 05, 2022



Manipulating objects with robotic hands is a complicated task. Not only the pose of the robot's end effector, but also the fingers of the hand need to be controlled and coordinated. Using human demonstrations of movements is an intuitive and data-efficient way of guiding the robot's behavior. We propose a modular framework with an automatic embodiment mapping to transfer human hand motions to robotic systems and use motion capture to record human motion. We evaluate our approach on eight challenging tasks, in which a robotic arm with a mounted robotic hand needs to grasp and manipulate deformable objects or small, fragile material.
Comparison of Distal Teacher Learning with Numerical and Analytical Methods to Solve Inverse Kinematics for Rigid-Body Mechanisms
Feb 29, 2020



Several publications are concerned with learning inverse kinematics, however, their evaluation is often limited and none of the proposed methods is of practical relevance for rigid-body kinematics with a known forward model. We argue that for rigid-body kinematics one of the first proposed machine learning (ML) solutions to inverse kinematics -- distal teaching (DT) -- is actually good enough when combined with differentiable programming libraries and we provide an extensive evaluation and comparison to analytical and numerical solutions. In particular, we analyze solve rate, accuracy, sample efficiency and scalability. Further, we study how DT handles joint limits, singularities, unreachable poses, trajectories and provide a comparison of execution times. The three approaches are evaluated on three different rigid body mechanisms with varying complexity. With enough training data and relaxed precision requirements, DT has a better solve rate and is faster than state-of-the-art numerical solvers for a 15-DoF mechanism. DT is not affected by singularities while numerical solutions are vulnerable to them. In all other cases numerical solutions are usually better. Analytical solutions outperform the other approaches by far if they are available.
A Survey of Behavior Learning Applications in Robotics -- State of the Art and Perspectives
Jun 05, 2019
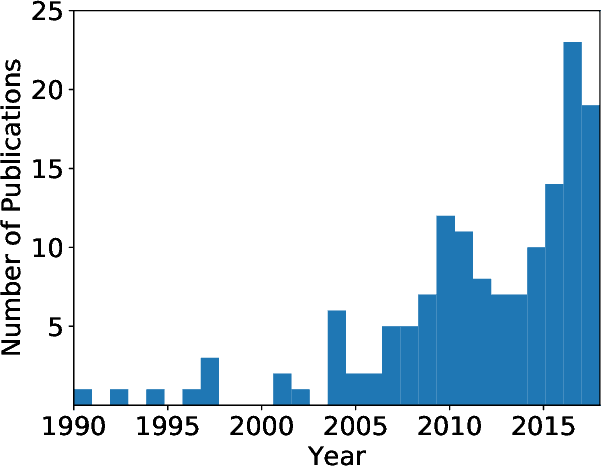

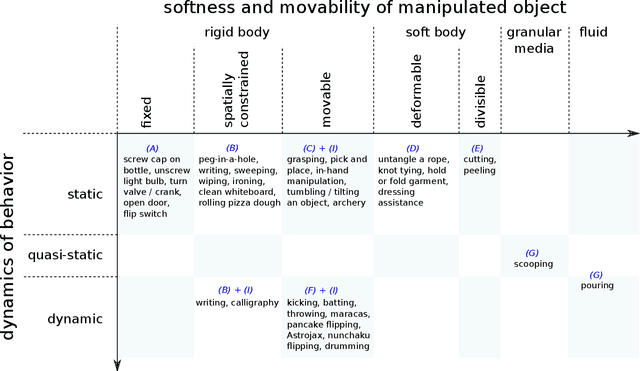
Recent success of machine learning in many domains has been overwhelming, which often leads to false expectations regarding the capabilities of behavior learning in robotics. In this survey, we analyze the current state of machine learning for robotic behaviors. We will give a broad overview of behaviors that have been learned and used on real robots. Our focus is on kinematically or sensorially complex robots. That includes humanoid robots or parts of humanoid robots, for example, legged robots or robotic arms. We will classify presented behaviors according to various categories and we will draw conclusions about what can be learned and what should be learned. Furthermore, we will give an outlook on problems that are challenging today but might be solved by machine learning in the future and argue that classical robotics and other approaches from artificial intelligence should be integrated more with machine learning to form complete, autonomous systems.
A Comparison of Policy Search in Joint Space and Cartesian Space for Refinement of Skills
Apr 14, 2019
Imitation learning is a way to teach robots skills that are demonstrated by humans. Transfering skills between these different kinematic structures seems to be straightforward in Cartesian space. Because of the correspondence problem, however, the result will most likely not be identical. This is why refinement is required, for example, by policy search. Policy search in Cartesian space is prone to reachability problems when using conventional inverse kinematic solvers. We propose a configurable approximate inverse kinematic solver and show that it can accelerate the refinement process considerably. We also compare empirically refinement in Cartesian space and refinement in joint space.
Empirical Evaluation of Contextual Policy Search with a Comparison-based Surrogate Model and Active Covariance Matrix Adaptation
Oct 26, 2018
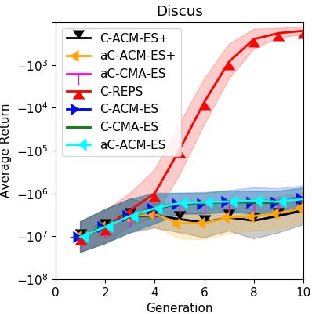
Contextual policy search (CPS) is a class of multi-task reinforcement learning algorithms that is particularly useful for robotic applications. A recent state-of-the-art method is Contextual Covariance Matrix Adaptation Evolution Strategies (C-CMA-ES). It is based on the standard black-box optimization algorithm CMA-ES. There are two useful extensions of CMA-ES that we will transfer to C-CMA-ES and evaluate empirically: ACM-ES, which uses a comparison-based surrogate model, and aCMA-ES, which uses an active update of the covariance matrix. We will show that improvements with these methods can be impressive in terms of sample-efficiency, although this is not relevant any more for the robotic domain.