 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOORD: The Oxford Offroad Radar Dataset
Mar 05, 2024There is a growing academic interest as well as commercial exploitation of millimetre-wave scanning radar for autonomous vehicle localisation and scene understanding. Although several datasets to support this research area have been released, they are primarily focused on urban or semi-urban environments. Nevertheless, rugged offroad deployments are important application areas which also present unique challenges and opportunities for this sensor technology. Therefore, the Oxford Offroad Radar Dataset (OORD) presents data collected in the rugged Scottish highlands in extreme weather. The radar data we offer to the community are accompanied by GPS/INS reference - to further stimulate research in radar place recognition. In total we release over 90GiB of radar scans as well as GPS and IMU readings by driving a diverse set of four routes over 11 forays, totalling approximately 154km of rugged driving. This is an area increasingly explored in literature, and we therefore present and release examples of recent open-sourced radar place recognition systems and their performance on our dataset. This includes a learned neural network, the weights of which we also release. The data and tools are made freely available to the community at https://oxford-robotics-institute.github.io/oord-dataset.
Textual Explanations for Automated Commentary Driving
Apr 12, 2023


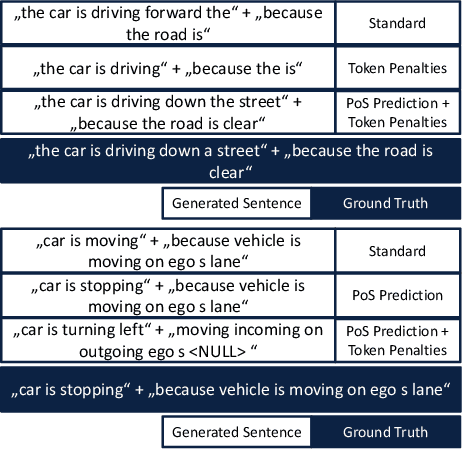
The provision of natural language explanations for the predictions of deep-learning-based vehicle controllers is critical as it enhances transparency and easy audit. In this work, a state-of-the-art (SOTA) prediction and explanation model is thoroughly evaluated and validated (as a benchmark) on the new Sense--Assess--eXplain (SAX). Additionally, we developed a new explainer model that improved over the baseline architecture in two ways: (i) an integration of part of speech prediction and (ii) an introduction of special token penalties. On the BLEU metric, our explanation generation technique outperformed SOTA by a factor of 7.7 when applied on the BDD-X dataset. The description generation technique is also improved by a factor of 1.3. Hence, our work contributes to the realisation of future explainable autonomous vehicles.