 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUtilizing Expert Features for Contrastive Learning of Time-Series Representations
Jun 23, 2022
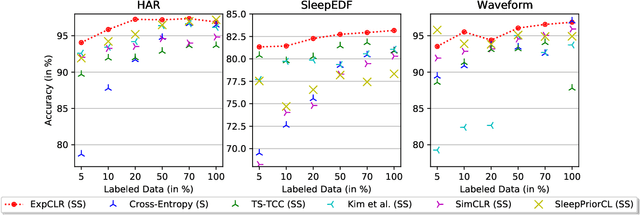
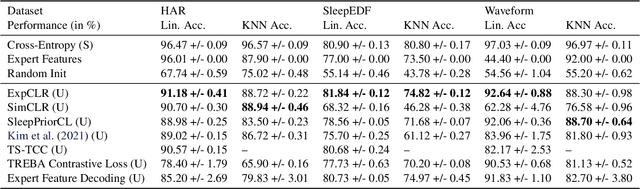
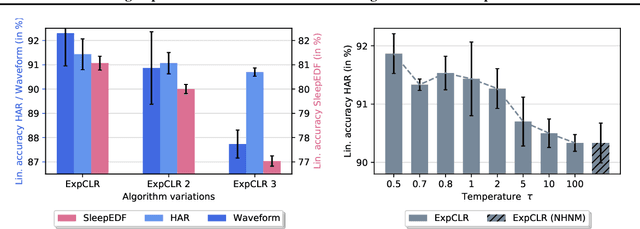
We present an approach that incorporates expert knowledge for time-series representation learning. Our method employs expert features to replace the commonly used data transformations in previous contrastive learning approaches. We do this since time-series data frequently stems from the industrial or medical field where expert features are often available from domain experts, while transformations are generally elusive for time-series data. We start by proposing two properties that useful time-series representations should fulfill and show that current representation learning approaches do not ensure these properties. We therefore devise ExpCLR, a novel contrastive learning approach built on an objective that utilizes expert features to encourage both properties for the learned representation. Finally, we demonstrate on three real-world time-series datasets that ExpCLR surpasses several state-of-the-art methods for both unsupervised and semi-supervised representation learning.
SOSP: Efficiently Capturing Global Correlations by Second-Order Structured Pruning
Oct 19, 2021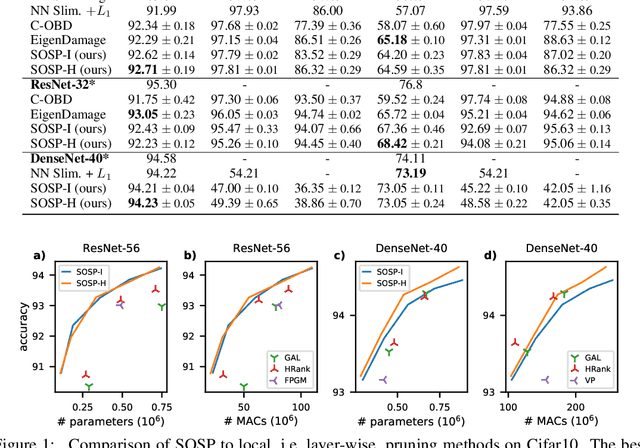
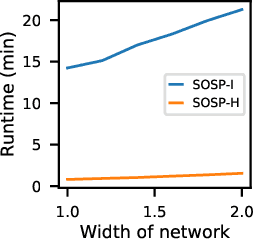
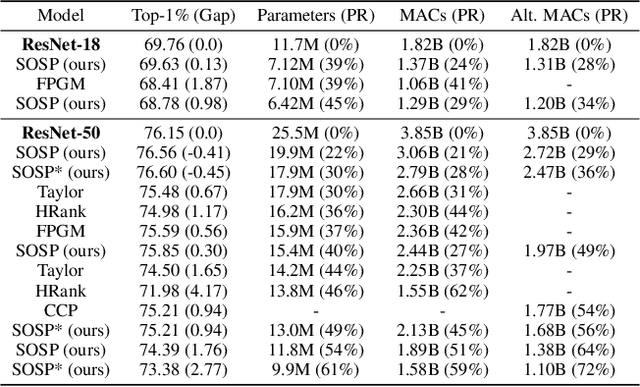
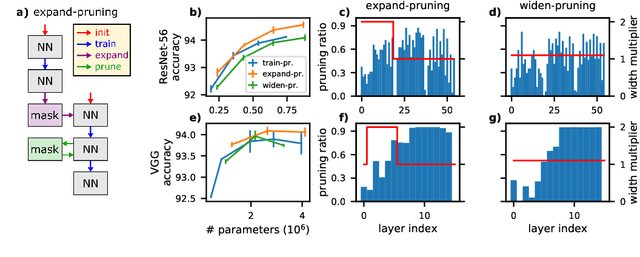
Pruning neural networks reduces inference time and memory costs. On standard hardware, these benefits will be especially prominent if coarse-grained structures, like feature maps, are pruned. We devise two novel saliency-based methods for second-order structured pruning (SOSP) which include correlations among all structures and layers. Our main method SOSP-H employs an innovative second-order approximation, which enables saliency evaluations by fast Hessian-vector products. SOSP-H thereby scales like a first-order method despite taking into account the full Hessian. We validate SOSP-H by comparing it to our second method SOSP-I that uses a well-established Hessian approximation, and to numerous state-of-the-art methods. While SOSP-H performs on par or better in terms of accuracy, it has clear advantages in terms of scalability and efficiency. This allowed us to scale SOSP-H to large-scale vision tasks, even though it captures correlations across all layers of the network. To underscore the global nature of our pruning methods, we evaluate their performance not only by removing structures from a pretrained network, but also by detecting architectural bottlenecks. We show that our algorithms allow to systematically reveal architectural bottlenecks, which we then remove to further increase the accuracy of the networks.
Which Minimizer Does My Neural Network Converge To?
Nov 04, 2020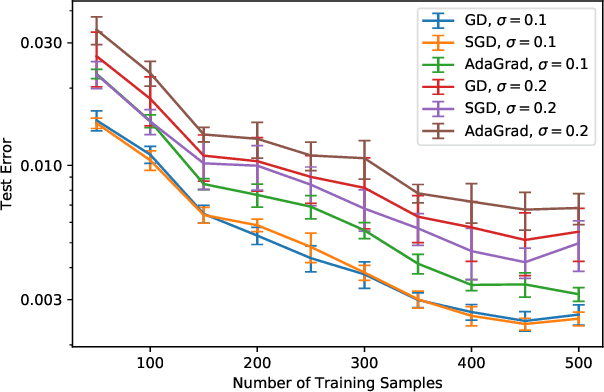
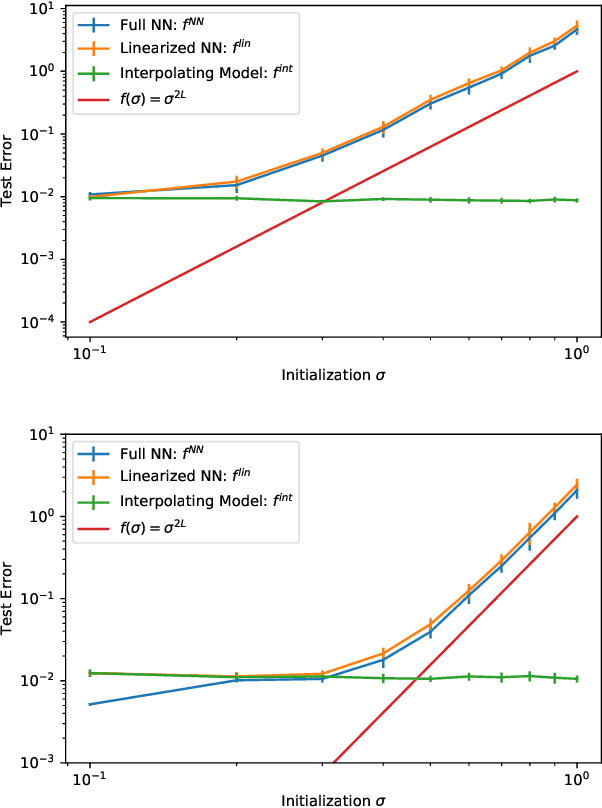
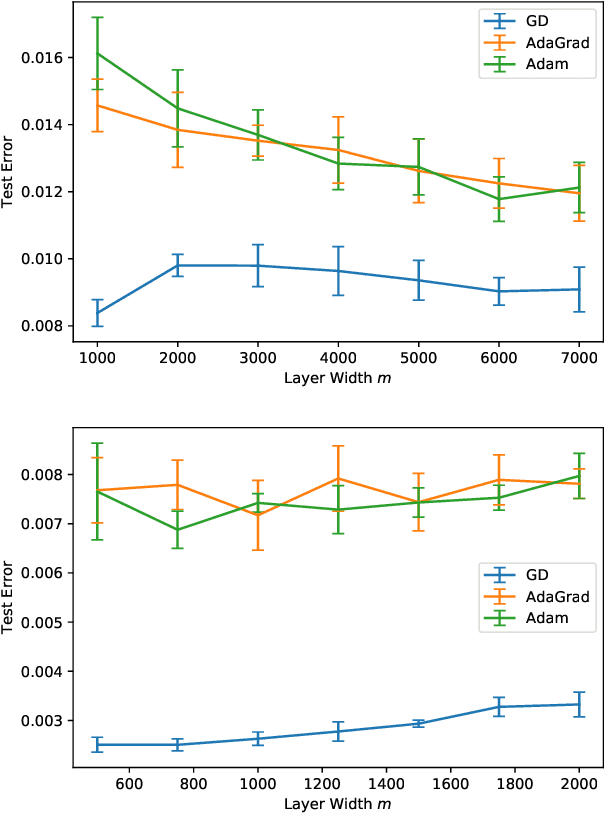
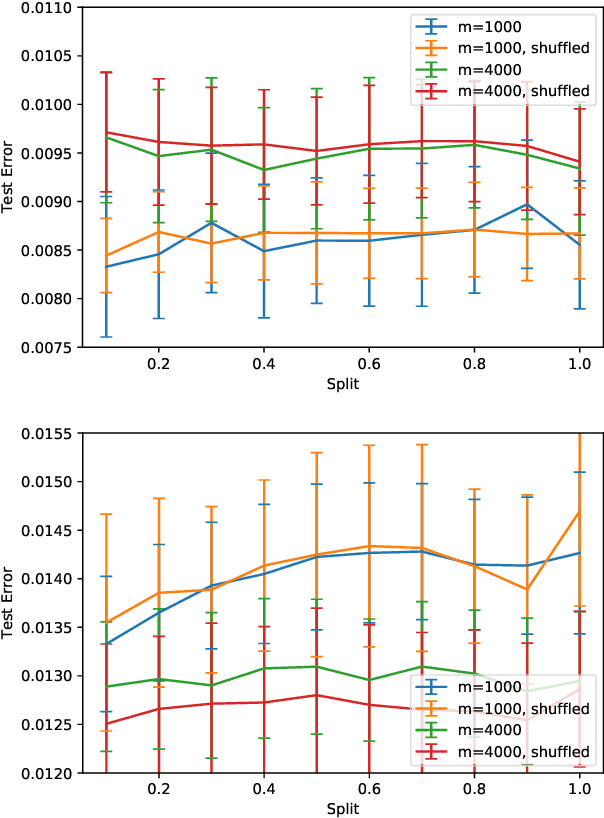
The loss surface of an overparameterized neural network (NN) possesses many global minima of zero training error. We explain how common variants of the standard NN training procedure change the minimizer obtained. First, we make explicit how the size of the initialization of a strongly overparameterized NN affects the minimizer and can deteriorate its final test performance. We propose a strategy to limit this effect. Then, we demonstrate that for adaptive optimization such as AdaGrad, the obtained minimizer generally differs from the gradient descent (GD) minimizer. This adaptive minimizer is changed further by stochastic mini-batch training, even though in the non-adaptive case GD and stochastic GD result in essentially the same minimizer. Lastly, we explain that these effects remain relevant for less overparameterized NNs. While overparameterization has its benefits, our work highlights that it induces sources of error absent from underparameterized models, some of which can be challenging to control.