 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscontinuity-aware Normal Integration for Generic Central Camera Models
Jul 08, 2025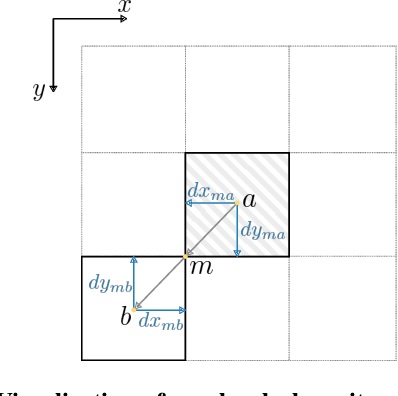
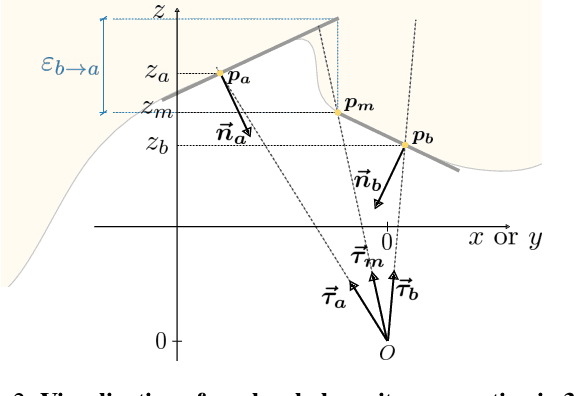
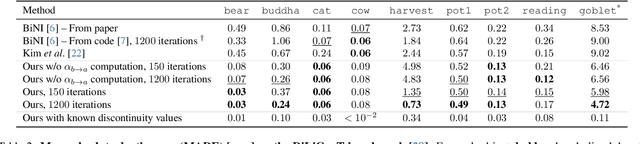
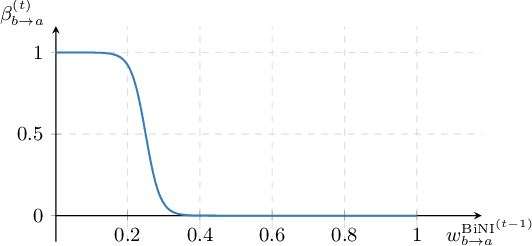
Recovering a 3D surface from its surface normal map, a problem known as normal integration, is a key component for photometric shape reconstruction techniques such as shape-from-shading and photometric stereo. The vast majority of existing approaches for normal integration handle only implicitly the presence of depth discontinuities and are limited to orthographic or ideal pinhole cameras. In this paper, we propose a novel formulation that allows modeling discontinuities explicitly and handling generic central cameras. Our key idea is based on a local planarity assumption, that we model through constraints between surface normals and ray directions. Compared to existing methods, our approach more accurately approximates the relation between depth and surface normals, achieves state-of-the-art results on the standard normal integration benchmark, and is the first to directly handle generic central camera models.
SparseFormer: Attention-based Depth Completion Network
Jun 09, 2022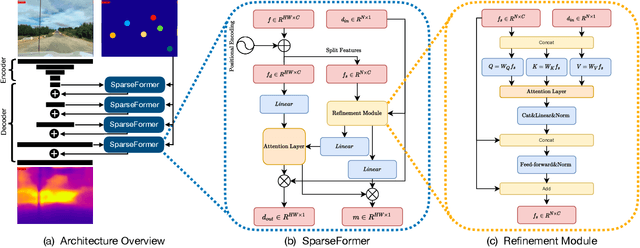
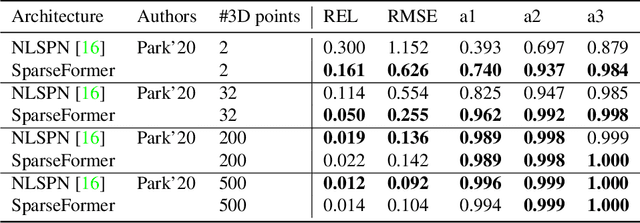
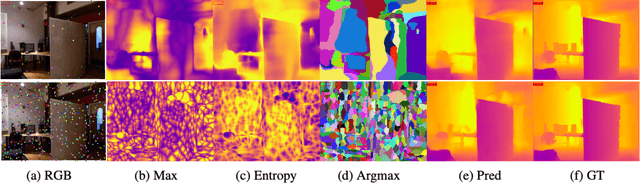
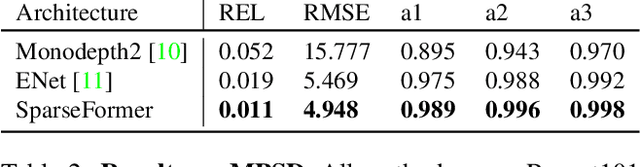
Most pipelines for Augmented and Virtual Reality estimate the ego-motion of the camera by creating a map of sparse 3D landmarks. In this paper, we tackle the problem of depth completion, that is, densifying this sparse 3D map using RGB images as guidance. This remains a challenging problem due to the low density, non-uniform and outlier-prone 3D landmarks produced by SfM and SLAM pipelines. We introduce a transformer block, SparseFormer, that fuses 3D landmarks with deep visual features to produce dense depth. The SparseFormer has a global receptive field, making the module especially effective for depth completion with low-density and non-uniform landmarks. To address the issue of depth outliers among the 3D landmarks, we introduce a trainable refinement module that filters outliers through attention between the sparse landmarks.
Disentangling Monocular 3D Object Detection
May 29, 2019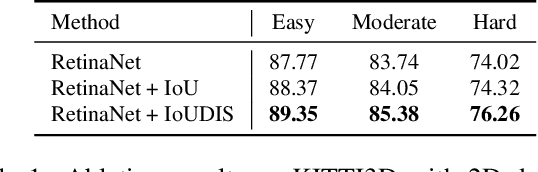
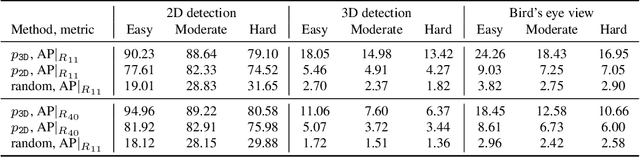
In this paper we propose an approach for monocular 3D object detection from a single RGB image, which leverages a novel disentangling transformation for 2D and 3D detection losses and a novel, self-supervised confidence score for 3D bounding boxes. Our proposed loss disentanglement has the twofold advantage of simplifying the training dynamics in the presence of losses with complex interactions of parameters, and sidestepping the issue of balancing independent regression terms. Our solution overcomes these issues by isolating the contribution made by groups of parameters to a given loss, without changing its nature. We further apply loss disentanglement to another novel, signed Intersection-over-Union criterion-driven loss for improving 2D detection results. Besides our methodological innovations, we critically review the AP metric used in KITTI3D, which emerged as the most important dataset for comparing 3D detection results. We identify and resolve a flaw in the 11-point interpolated AP metric, affecting all previously published detection results and particularly biases the results of monocular 3D detection. We provide extensive experimental evaluations and ablation studies on the KITTI3D and nuScenes datasets, setting new state-of-the-art results on object category car by large margins.