 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Visual Re-Identification of Fish using Fine-Grained Classification for Electronic Monitoring in Fisheries
Dec 11, 2025Accurate fisheries data are crucial for effective and sustainable marine resource management. With the recent adoption of Electronic Monitoring (EM) systems, more video data is now being collected than can be feasibly reviewed manually. This paper addresses this challenge by developing an optimized deep learning pipeline for automated fish re-identification (Re-ID) using the novel AutoFish dataset, which simulates EM systems with conveyor belts with six similarly looking fish species. We demonstrate that key Re-ID metrics (R1 and mAP@k) are substantially improved by using hard triplet mining in conjunction with a custom image transformation pipeline that includes dataset-specific normalization. By employing these strategies, we demonstrate that the Vision Transformer-based Swin-T architecture consistently outperforms the Convolutional Neural Network-based ResNet-50, achieving peak performance of 41.65% mAP@k and 90.43% Rank-1 accuracy. An in-depth analysis reveals that the primary challenge is distinguishing visually similar individuals of the same species (Intra-species errors), where viewpoint inconsistency proves significantly more detrimental than partial occlusion. The source code and documentation are available at: https://github.com/msamdk/Fish_Re_Identification.git
Sea-ing Through Scattered Rays: Revisiting the Image Formation Model for Realistic Underwater Image Generation
Sep 18, 2025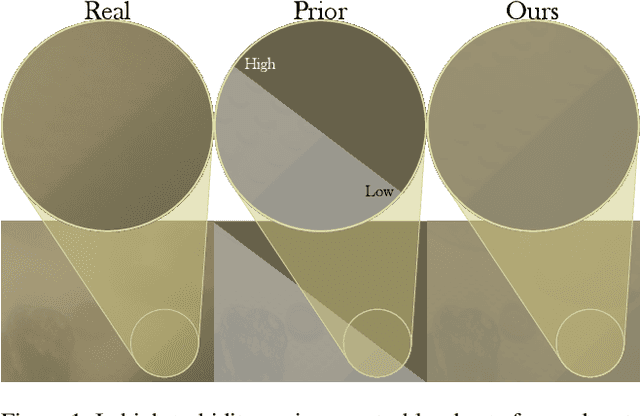



In recent years, the underwater image formation model has found extensive use in the generation of synthetic underwater data. Although many approaches focus on scenes primarily affected by discoloration, they often overlook the model's ability to capture the complex, distance-dependent visibility loss present in highly turbid environments. In this work, we propose an improved synthetic data generation pipeline that includes the commonly omitted forward scattering term, while also considering a nonuniform medium. Additionally, we collected the BUCKET dataset under controlled turbidity conditions to acquire real turbid footage with the corresponding reference images. Our results demonstrate qualitative improvements over the reference model, particularly under increasing turbidity, with a selection rate of 82. 5\% by survey participants. Data and code can be accessed on the project page: vap.aau.dk/sea-ing-through-scattered-rays.
AutoFish: Dataset and Benchmark for Fine-grained Analysis of Fish
Jan 07, 2025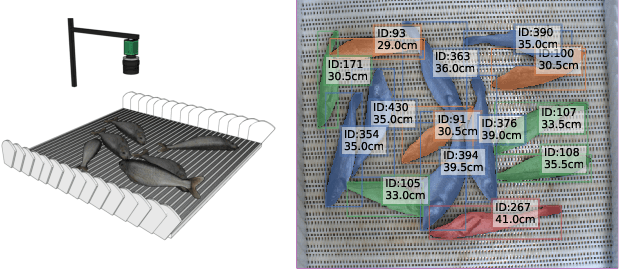
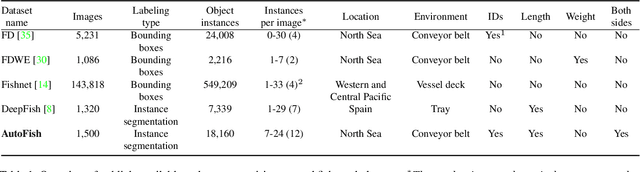
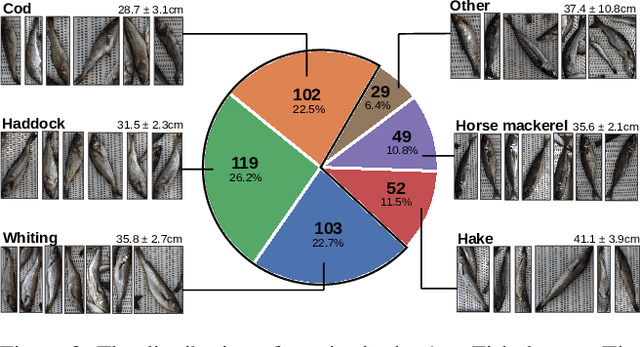
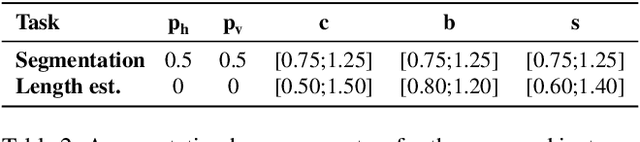
Automated fish documentation processes are in the near future expected to play an essential role in sustainable fisheries management and for addressing challenges of overfishing. In this paper, we present a novel and publicly available dataset named AutoFish designed for fine-grained fish analysis. The dataset comprises 1,500 images of 454 specimens of visually similar fish placed in various constellations on a white conveyor belt and annotated with instance segmentation masks, IDs, and length measurements. The data was collected in a controlled environment using an RGB camera. The annotation procedure involved manual point annotations, initial segmentation masks proposed by the Segment Anything Model (SAM), and subsequent manual correction of the masks. We establish baseline instance segmentation results using two variations of the Mask2Former architecture, with the best performing model reaching an mAP of 89.15%. Additionally, we present two baseline length estimation methods, the best performing being a custom MobileNetV2-based regression model reaching an MAE of 0.62cm in images with no occlusion and 1.38cm in images with occlusion. Link to project page: https://vap.aau.dk/autofish/.
BrackishMOT: The Brackish Multi-Object Tracking Dataset
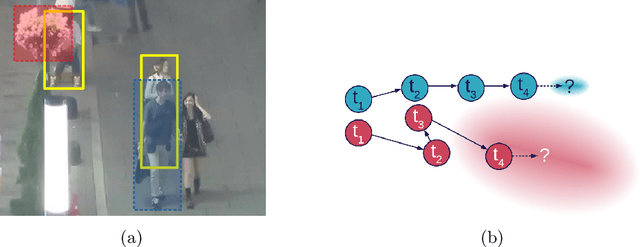
Feb 21, 2023There exist no publicly available annotated underwater multi-object tracking (MOT) datasets captured in turbid environments. To remedy this we propose the BrackishMOT dataset with focus on tracking schools of small fish, which is a notoriously difficult MOT task. BrackishMOT consists of 98 sequences captured in the wild. Alongside the novel dataset, we present baseline results by training a state-of-the-art tracker. Additionally, we propose a framework for creating synthetic sequences in order to expand the dataset. The framework consists of animated fish models and realistic underwater environments. We analyse the effects of including synthetic data during training and show that a combination of real and synthetic underwater training data can enhance tracking performance. Links to code and data can be found at https://www.vap.aau.dk/brackishmot
MOTCOM: The Multi-Object Tracking Dataset Complexity Metric
Jul 20, 2022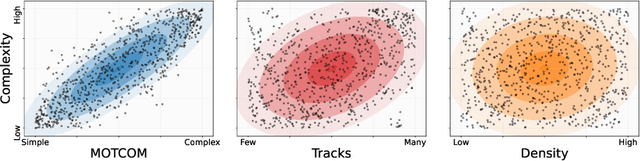
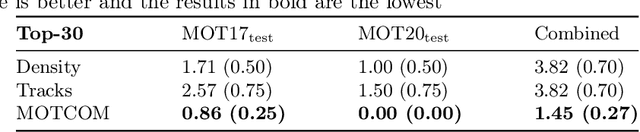

There exists no comprehensive metric for describing the complexity of Multi-Object Tracking (MOT) sequences. This lack of metrics decreases explainability, complicates comparison of datasets, and reduces the conversation on tracker performance to a matter of leader board position. As a remedy, we present the novel MOT dataset complexity metric (MOTCOM), which is a combination of three sub-metrics inspired by key problems in MOT: occlusion, erratic motion, and visual similarity. The insights of MOTCOM can open nuanced discussions on tracker performance and may lead to a wider acknowledgement of novel contributions developed for either less known datasets or those aimed at solving sub-problems. We evaluate MOTCOM on the comprehensive MOT17, MOT20, and MOTSynth datasets and show that MOTCOM is far better at describing the complexity of MOT sequences compared to the conventional density and number of tracks. Project page at https://vap.aau.dk/motcom
3D-ZeF: A 3D Zebrafish Tracking Benchmark Dataset
Jun 15, 2020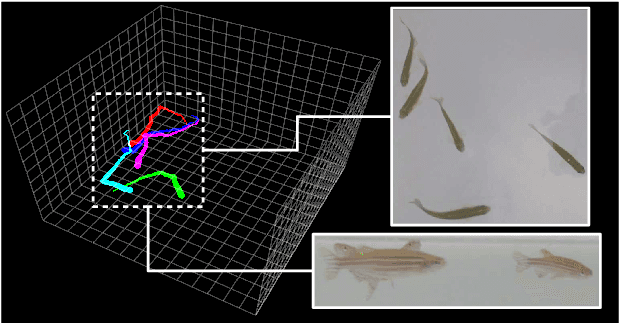
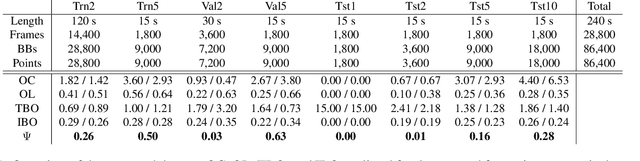
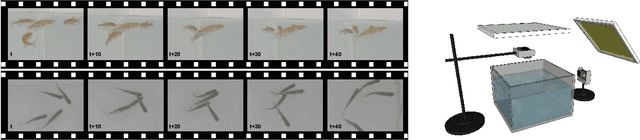
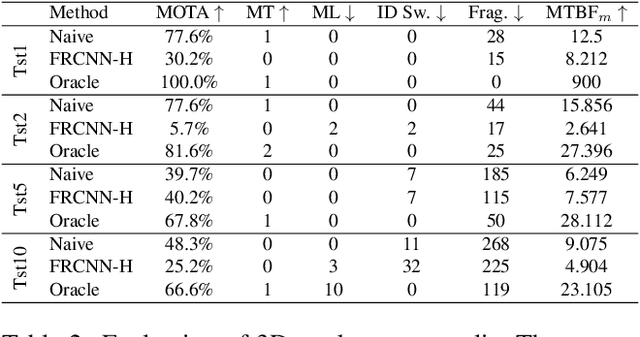
In this work we present a novel publicly available stereo based 3D RGB dataset for multi-object zebrafish tracking, called 3D-ZeF. Zebrafish is an increasingly popular model organism used for studying neurological disorders, drug addiction, and more. Behavioral analysis is often a critical part of such research. However, visual similarity, occlusion, and erratic movement of the zebrafish makes robust 3D tracking a challenging and unsolved problem. The proposed dataset consists of eight sequences with a duration between 15-120 seconds and 1-10 free moving zebrafish. The videos have been annotated with a total of 86,400 points and bounding boxes. Furthermore, we present a complexity score and a novel open-source modular baseline system for 3D tracking of zebrafish. The performance of the system is measured with respect to two detectors: a naive approach and a Faster R-CNN based fish head detector. The system reaches a MOTA of up to 77.6%. Links to the code and dataset is available at the project page https://vap.aau.dk/3d-zef