 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Control in Multi-Rotor Aerial Robots Using Deep Reinforcement Learning
Feb 09, 2025This paper investigates the application of Deep Reinforcement (DRL) Learning to address motion control challenges in drones for additive manufacturing (AM). Drone-based additive manufacturing promises flexible and autonomous material deposition in large-scale or hazardous environments. However, achieving robust real-time control of a multi-rotor aerial robot under varying payloads and potential disturbances remains challenging. Traditional controllers like PID often require frequent parameter re-tuning, limiting their applicability in dynamic scenarios. We propose a DRL framework that learns adaptable control policies for multi-rotor drones performing waypoint navigation in AM tasks. We compare Deep Deterministic Policy Gradient (DDPG) and Twin Delayed Deep Deterministic Policy Gradient (TD3) within a curriculum learning scheme designed to handle increasing complexity. Our experiments show TD3 consistently balances training stability, accuracy, and success, particularly when mass variability is introduced. These findings provide a scalable path toward robust, autonomous drone control in additive manufacturing.
PPO-based Dynamic Control of Uncertain Floating Platforms in the Zero-G Environment
Jul 03, 2024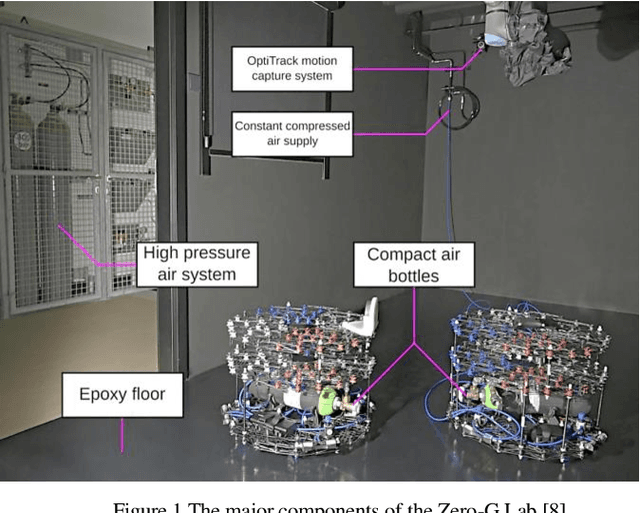
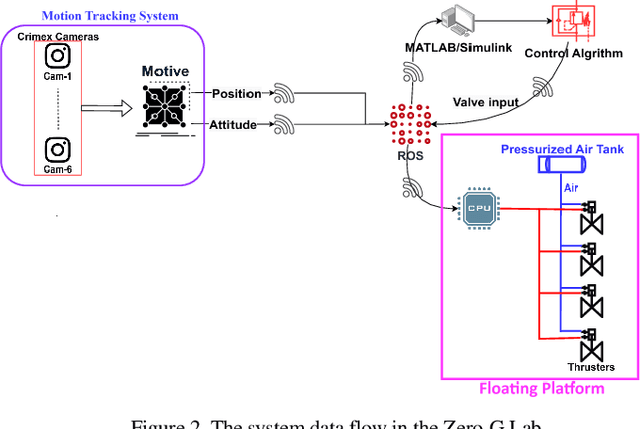
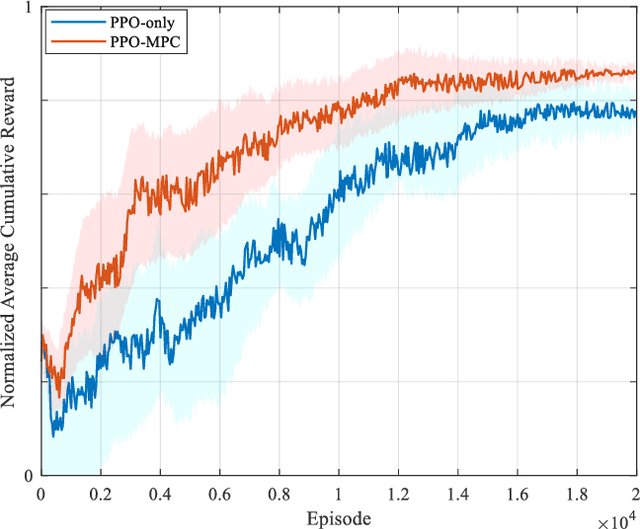

In the field of space exploration, floating platforms play a crucial role in scientific investigations and technological advancements. However, controlling these platforms in zero-gravity environments presents unique challenges, including uncertainties and disturbances. This paper introduces an innovative approach that combines Proximal Policy Optimization (PPO) with Model Predictive Control (MPC) in the zero-gravity laboratory (Zero-G Lab) at the University of Luxembourg. This approach leverages PPO's reinforcement learning power and MPC's precision to navigate the complex control dynamics of floating platforms. Unlike traditional control methods, this PPO-MPC approach learns from MPC predictions, adapting to unmodeled dynamics and disturbances, resulting in a resilient control framework tailored to the zero-gravity environment. Simulations and experiments in the Zero-G Lab validate this approach, showcasing the adaptability of the PPO agent. This research opens new possibilities for controlling floating platforms in zero-gravity settings, promising advancements in space exploration.
Human-Centric Aware UAV Trajectory Planning in Search and Rescue Missions Employing Multi-Objective Reinforcement Learning with AHP and Similarity-Based Experience Replay
Feb 28, 2024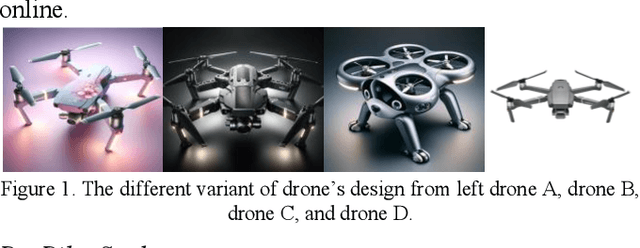
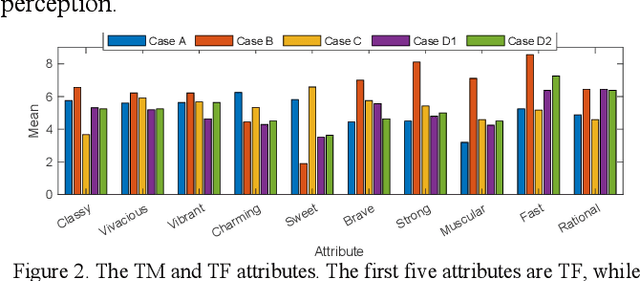
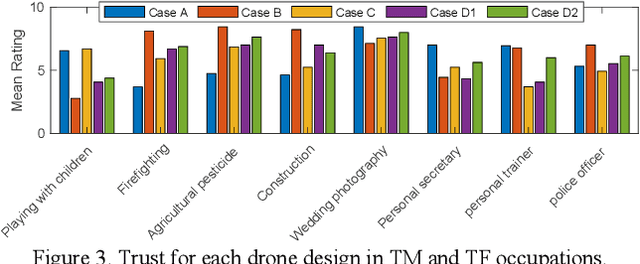
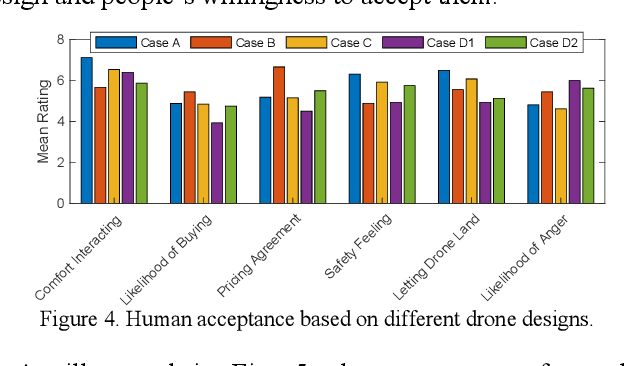
The integration of Unmanned Aerial Vehicles (UAVs) into Search and Rescue (SAR) missions presents a promising avenue for enhancing operational efficiency and effectiveness. However, the success of these missions is not solely dependent on the technical capabilities of the drones but also on their acceptance and interaction with humans on the ground. This paper explores the effect of human-centric factor in UAV trajectory planning for SAR missions. We introduce a novel approach based on the reinforcement learning augmented with Analytic Hierarchy Process and novel similarity-based experience replay to optimize UAV trajectories, balancing operational objectives with human comfort and safety considerations. Additionally, through a comprehensive survey, we investigate the impact of gender cues and anthropomorphism in UAV design on public acceptance and trust, revealing significant implications for drone interaction strategies in SAR. Our contributions include (1) a reinforcement learning framework for UAV trajectory planning that dynamically integrates multi-objective considerations, (2) an analysis of human perceptions towards gendered and anthropomorphized drones in SAR contexts, and (3) the application of similarity-based experience replay for enhanced learning efficiency in complex SAR scenarios. The findings offer valuable insights into designing UAV systems that are not only technically proficient but also aligned with human-centric values.
To The Effects of Anthropomorphic Cues on Human Perception of Non-Human Robots: The Role of Gender
Sep 29, 2023As non-humanoid robots increasingly permeate various sectors, understanding their design implications for human acceptance becomes paramount. Despite their ubiquity, studies on how to optimize their design for better human interaction are sparse. Our investigation, conducted through two comprehensive surveys, addresses this gap. The first survey delineated correlations between robot behavioral and physical attributes, perceived occupation suitability, and gender attributions, suggesting that both design and perceived gender significantly influence acceptance. Survey 2 delved into the effects of varying gender cues on robot designs and their consequent impacts on human-robot interactions. Our findings highlighted that distinct gender cues can bolster or impede interaction comfort.
Safe Hierarchical Reinforcement Learning for CubeSat Task Scheduling Based on Energy Consumption
Sep 21, 2023



This paper presents a Hierarchical Reinforcement Learning methodology tailored for optimizing CubeSat task scheduling in Low Earth Orbits (LEO). Incorporating a high-level policy for global task distribution and a low-level policy for real-time adaptations as a safety mechanism, our approach integrates the Similarity Attention-based Encoder (SABE) for task prioritization and an MLP estimator for energy consumption forecasting. Integrating this mechanism creates a safe and fault-tolerant system for CubeSat task scheduling. Simulation results validate the Hierarchical Reinforcement Learning superior convergence and task success rate, outperforming both the MADDPG model and traditional random scheduling across multiple CubeSat configurations.
UAV Path Planning Employing MPC- Reinforcement Learning Method Considering Collision Avoidance
Mar 07, 2023In this paper, we tackle the problem of Unmanned Aerial (UA V) path planning in complex and uncertain environments by designing a Model Predictive Control (MPC), based on a Long-Short-Term Memory (LSTM) network integrated into the Deep Deterministic Policy Gradient algorithm. In the proposed solution, LSTM-MPC operates as a deterministic policy within the DDPG network, and it leverages a predicting pool to store predicted future states and actions for improved robustness and efficiency. The use of the predicting pool also enables the initialization of the critic network, leading to improved convergence speed and reduced failure rate compared to traditional reinforcement learning and deep reinforcement learning methods. The effectiveness of the proposed solution is evaluated by numerical simulations.