 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePPO-based Dynamic Control of Uncertain Floating Platforms in the Zero-G Environment
Paper and Code
Jul 03, 2024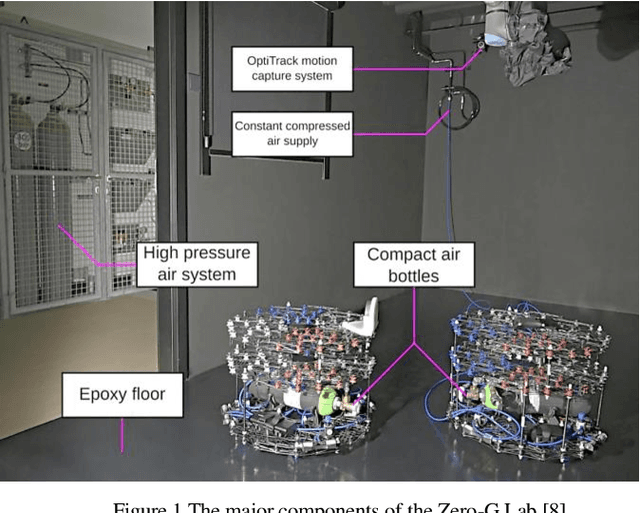
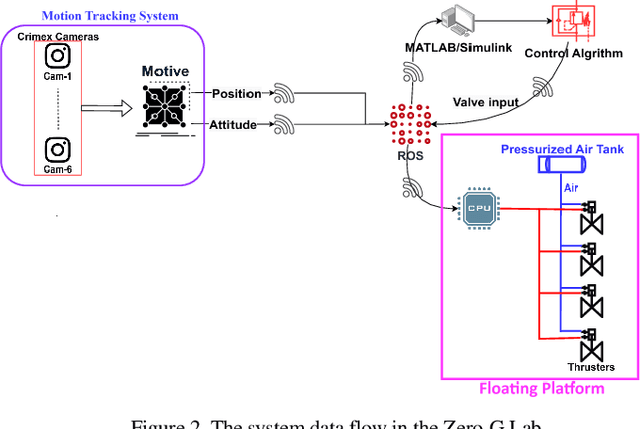
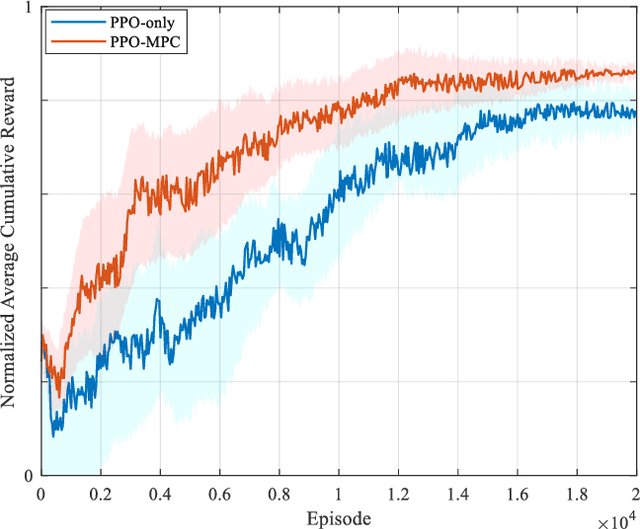

In the field of space exploration, floating platforms play a crucial role in scientific investigations and technological advancements. However, controlling these platforms in zero-gravity environments presents unique challenges, including uncertainties and disturbances. This paper introduces an innovative approach that combines Proximal Policy Optimization (PPO) with Model Predictive Control (MPC) in the zero-gravity laboratory (Zero-G Lab) at the University of Luxembourg. This approach leverages PPO's reinforcement learning power and MPC's precision to navigate the complex control dynamics of floating platforms. Unlike traditional control methods, this PPO-MPC approach learns from MPC predictions, adapting to unmodeled dynamics and disturbances, resulting in a resilient control framework tailored to the zero-gravity environment. Simulations and experiments in the Zero-G Lab validate this approach, showcasing the adaptability of the PPO agent. This research opens new possibilities for controlling floating platforms in zero-gravity settings, promising advancements in space exploration.