 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOutput-Feedback Path Planning with Robustness to State-Dependent Errors
May 15, 2022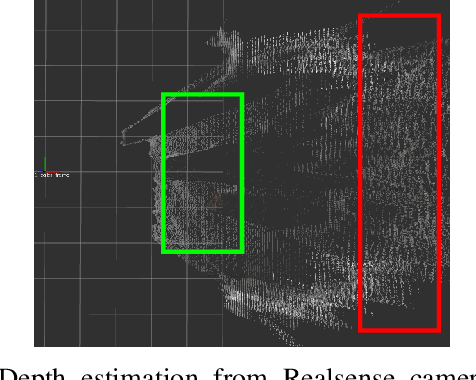

We consider the problem of sample-based feedback motion planning from measurements affected by systematic errors. Our previous work presented output feedback controllers that use measurements from landmarks in the environment to navigate through a cell-decomposable environment using duality, Control Lyapunov and Barrier Functions (CLF, CBF), and Linear Programming. In this paper, we build on this previous work with a novel strategy that allows the use of measurements affected by systematic errors in perceived depth (similarly to what might be generated by vision-based sensors), as opposed to accurate displacement measurements. As a result, our new method has the advantage of providing more robust performance (with quantitative guarantees) when inaccurate sensors are used. We test the proposed algorithm in the simulation to evaluate the performance limits of our approach predicted by our theoretical derivations.
Sample-Based Output-Feedback Navigation with Bearing Measurements
Mar 08, 2022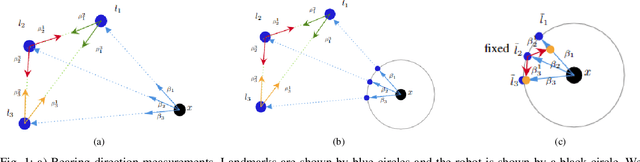

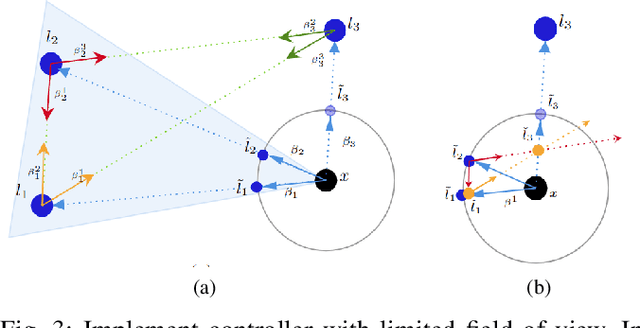

We consider the problem of sample-based feedback-based motion planning from bearing (direction-only) measurements. We build on our previous work that defines a cell decomposition of the environment using RRT*, and finds an output feedback controller to navigate through each cell toward a goal location using duality, Control Lyapunov and Barrier Functions (CLF, CBF), and Linear Programming. In this paper, we propose a novel strategy that uses relative bearing measurements with respect to a set of landmarks in the environment, as opposed to full relative displacements. The main advantage is then that the measurements can be obtained using a simple monocular camera. We test the proposed algorithm in the simulation, and then in an experimental environment to evaluate the performance of our approach with respect to practical issues such as mismatches in the dynamical model of the robot, and measurements acquired with a camera with a limited field of view.
Classification of Time-Series Data Using Boosted Decision Trees
Oct 01, 2021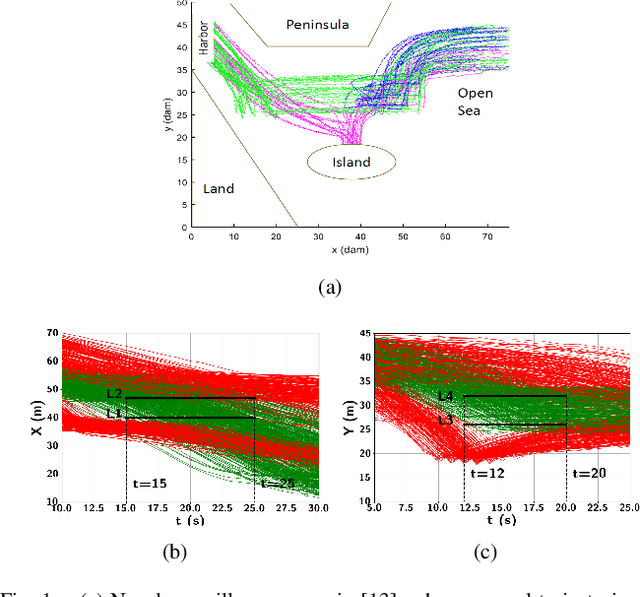
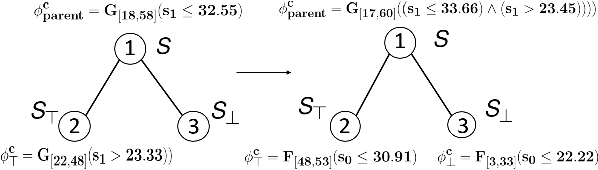
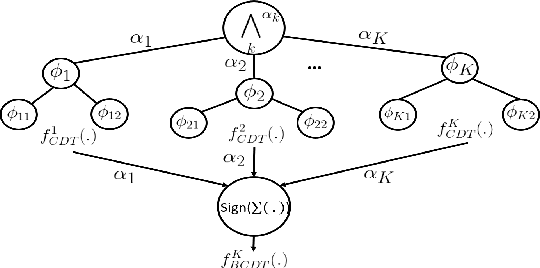
Time-series data classification is central to the analysis and control of autonomous systems, such as robots and self-driving cars. Temporal logic-based learning algorithms have been proposed recently as classifiers of such data. However, current frameworks are either inaccurate for real-world applications, such as autonomous driving, or they generate long and complicated formulae that lack interpretability. To address these limitations, we introduce a novel learning method, called Boosted Concise Decision Trees (BCDTs), to generate binary classifiers that are represented as Signal Temporal Logic (STL) formulae. Our algorithm leverages an ensemble of Concise Decision Trees (CDTs) to improve the classification performance, where each CDT is a decision tree that is empowered by a set of techniques to generate simpler formulae and improve interpretability. The effectiveness and classification performance of our algorithm are evaluated on naval surveillance and urban-driving case studies.
Robust Sample-Based Output-Feedback Path Planning
May 28, 2021

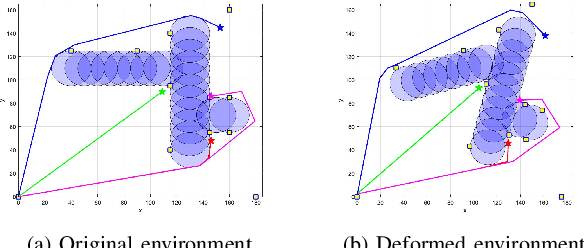

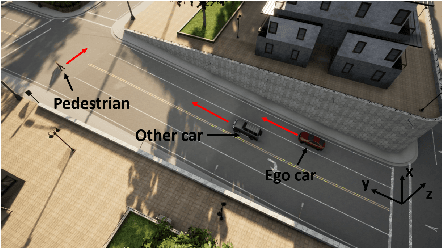
We propose a novel approach for sampling-based and control-based motion planning that combines a representation of the environment obtained via a modified version of optimal Rapidly-exploring Random Trees (RRT*), with landmark-based output-feedback controllers obtained via Control Lyapunov Functions, Control Barrier Functions, and robust Linear Programming. Our solution inherits many benefits of RRT*-like algorithms, such as the ability to implicitly handle arbitrarily complex obstacles, and asymptotic optimality. Additionally, it extends planning beyond the discrete nominal paths, as feedback controllers can correct deviations from such paths, and are robust to discrepancies between the map used for planning and the real environment. We test our algorithms first in simulations and then in experiments, testing the robustness of the approach to practical conditions, such as deformations of the environment, mismatches in the dynamical model of the robot, and measurements acquired with a camera with a limited field of view.
Inferring Temporal Logic Properties from Data using Boosted Decision Trees
May 24, 2021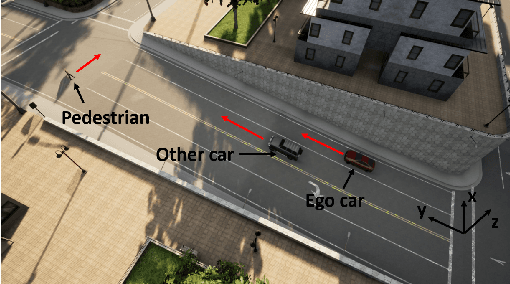
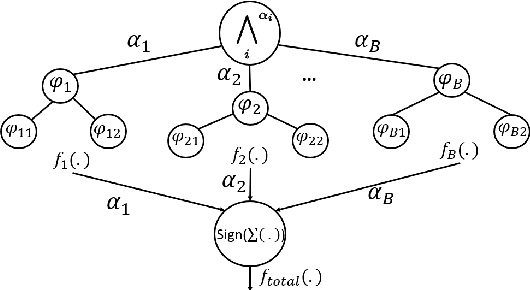
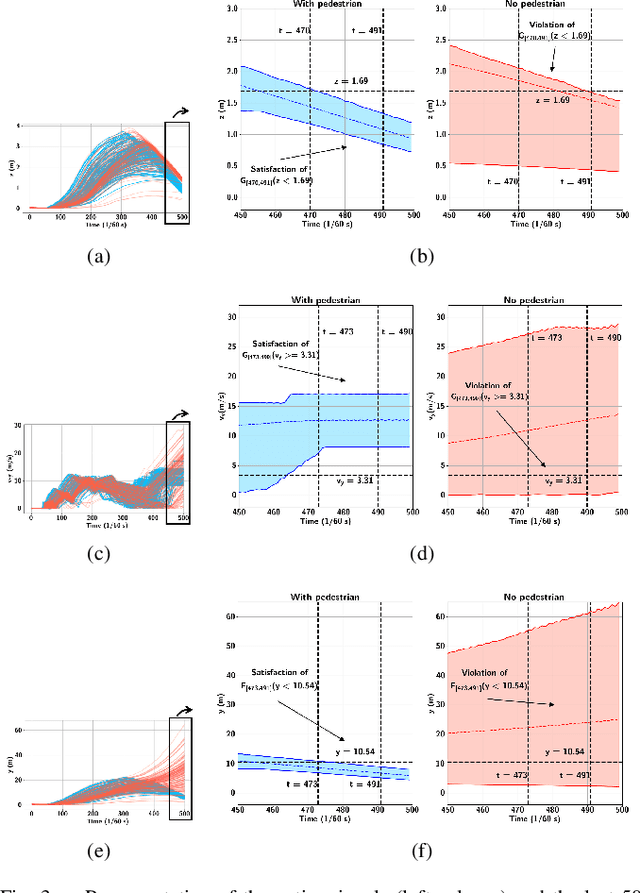
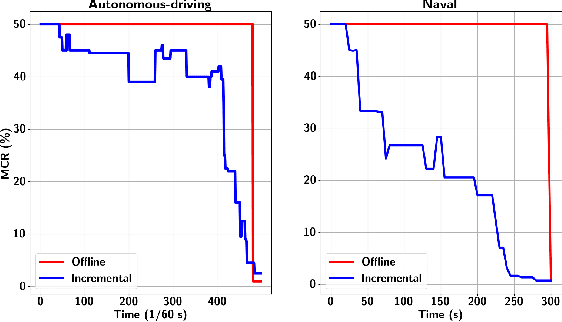
Many autonomous systems, such as robots and self-driving cars, involve real-time decision making in complex environments, and require prediction of future outcomes from limited data. Moreover, their decisions are increasingly required to be interpretable to humans for safe and trustworthy co-existence. This paper is a first step towards interpretable learning-based robot control. We introduce a novel learning problem, called incremental formula and predictor learning, to generate binary classifiers with temporal logic structure from time-series data. The classifiers are represented as pairs of Signal Temporal Logic (STL) formulae and predictors for their satisfaction. The incremental property provides prediction of labels for prefix signals that are revealed over time. We propose a boosted decision-tree algorithm that leverages weak, but computationally inexpensive, learners to increase prediction and runtime performance. The effectiveness and classification accuracy of our algorithms are evaluated on autonomous-driving and naval surveillance case studies.
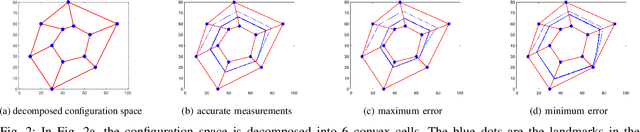
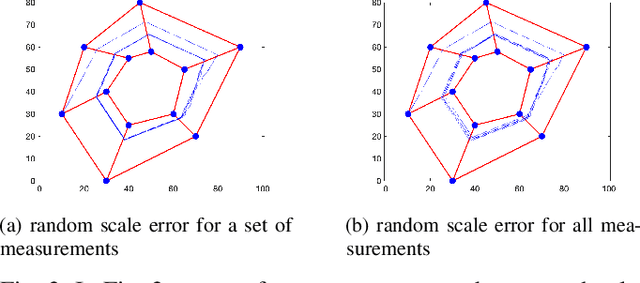
Robust Planning and Control For Polygonal Environments via Linear Programming
Oct 17, 2019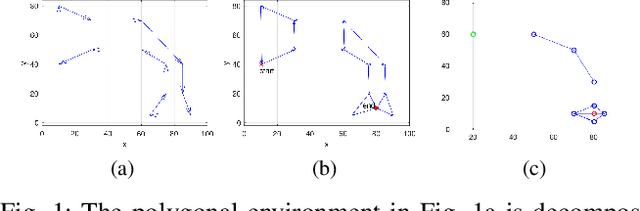
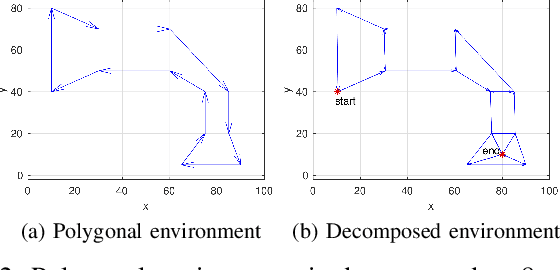
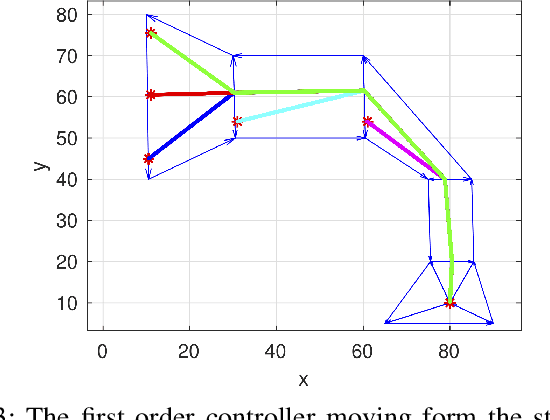
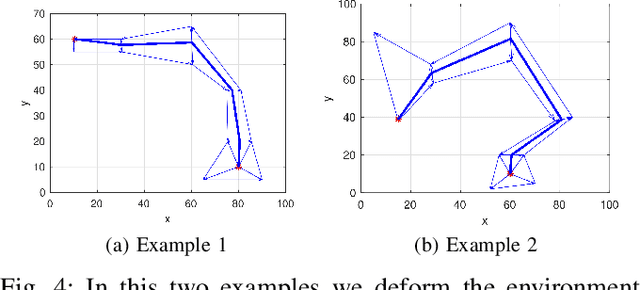
In this paper, we are concerned with the design of a set of controllers, on a cell decomposition of a polygonal environment through Linear Programming. The core of our proposed method consists of a convex min-max formulation that synthesizes an output-feedback controller, based on relative displacement measurements with respect to a set of landmarks. The optimization problem is formulated using piece-wise linear Control Lyapunov Function and Control Barrier Function constraints, to provide guarantees of stability and safety. The inner maximization problem ensures that these constraints are met by all the points in each cell, while the outer minimization problem balances the different constraints to optimize robustness. We convert this min-max optimization problem to a regular Linear Programming problem, by forming the dual of the inner maximization problem. Although in principle our approach is applicable to any system with piecewise linear dynamics, in this paper as a proof of concept, we apply it to first and second order integrators. We show through simulations that the resulting controllers are robust to significant deformations of the environment.