 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Planning and Control For Polygonal Environments via Linear Programming
Paper and Code
Oct 17, 2019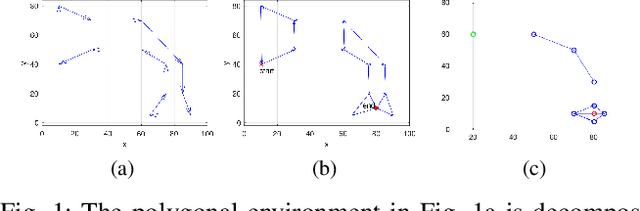
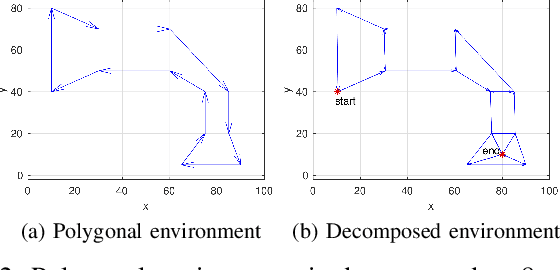
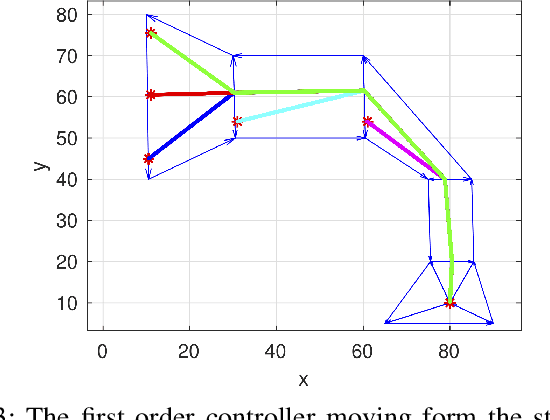
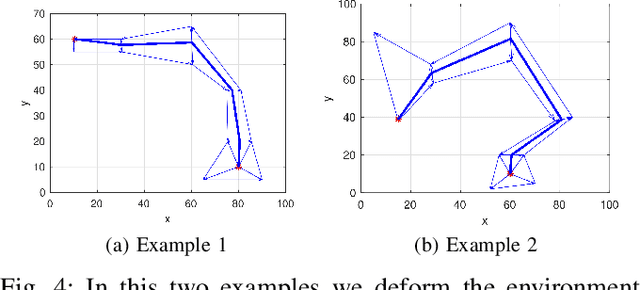
In this paper, we are concerned with the design of a set of controllers, on a cell decomposition of a polygonal environment through Linear Programming. The core of our proposed method consists of a convex min-max formulation that synthesizes an output-feedback controller, based on relative displacement measurements with respect to a set of landmarks. The optimization problem is formulated using piece-wise linear Control Lyapunov Function and Control Barrier Function constraints, to provide guarantees of stability and safety. The inner maximization problem ensures that these constraints are met by all the points in each cell, while the outer minimization problem balances the different constraints to optimize robustness. We convert this min-max optimization problem to a regular Linear Programming problem, by forming the dual of the inner maximization problem. Although in principle our approach is applicable to any system with piecewise linear dynamics, in this paper as a proof of concept, we apply it to first and second order integrators. We show through simulations that the resulting controllers are robust to significant deformations of the environment.