 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePersonalized Federated Learning of Probabilistic Models: A PAC-Bayesian Approach
Jan 16, 2024



Federated learning aims to infer a shared model from private and decentralized data stored locally by multiple clients. Personalized federated learning (PFL) goes one step further by adapting the global model to each client, enhancing the model's fit for different clients. A significant level of personalization is required for highly heterogeneous clients, but can be challenging to achieve especially when they have small datasets. To address this problem, we propose a PFL algorithm named PAC-PFL for learning probabilistic models within a PAC-Bayesian framework that utilizes differential privacy to handle data-dependent priors. Our algorithm collaboratively learns a shared hyper-posterior and regards each client's posterior inference as the personalization step. By establishing and minimizing a generalization bound on the average true risk of clients, PAC-PFL effectively combats over-fitting. PACPFL achieves accurate and well-calibrated predictions, supported by experiments on a dataset of photovoltaic panel power generation, FEMNIST dataset (Caldas et al., 2019), and Dirichlet-partitioned EMNIST dataset (Cohen et al., 2017).
A unified framework for walking and running of bipedal robots
Oct 18, 2021
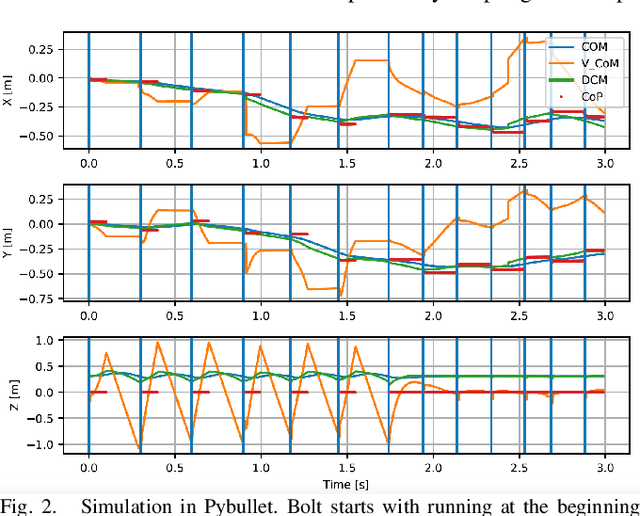
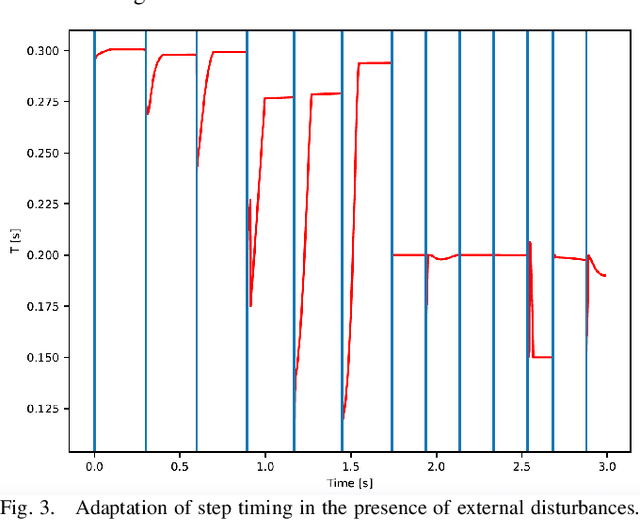
In this paper, we propose a novel framework capable of generating various walking and running gaits for bipedal robots. The main goal is to relax the fixed center of mass (CoM) height assumption of the linear inverted pendulum model (LIPM) and generate a wider range of walking and running motions, without a considerable increase in complexity. To do so, we use the concept of virtual constraints in the centroidal space which enables generating motions beyond walking while keeping the complexity at a minimum. By a proper choice of these virtual constraints, we show that we can generate different types of walking and running motions. More importantly, enforcing the virtual constraints through feedback renders the dynamics linear and enables us to design a feedback control mechanism which adapts the next step location and timing in face of disturbances, through a simple quadratic program (QP). To show the effectiveness of this framework, we showcase different walking and running simulations of the biped robot Bolt in the presence of both environmental uncertainties and external disturbances.